6790846702
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II,
Kraków 16-18 Października 2012 r.
Do znanych konstrukcji robotów trzynożnych można zaliczyć robot STriDER [1] (Rys. 1a), którego chód jest realizowany w ten sposób, że przenoszona noga przemieszcza się pod korpusem, który z kolei wykonuje obrót o 180 stopni (Rys. 1 b). Innym znanym rozwiązaniem jest robot Rotopod [3] (Rys. 1 c), który jest bardzo prostą konstrukcją zawierającą trzy nogi posiadające tylko po jednym translacyjnym stopniu swobody oraz wirującą masę, która w odpowiedni sposób powoduje przechylenie robota umożliwiając przestawienie jednej nogi (Rys. 1 d).


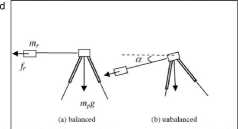
Rys. 1. Przykłady robotów trzynożnych: robot STriDER (a) i sposób jego poruszania się (b) [1 ], robot Rotopod (c) i metoda stabilizacji jego uchu (d) [3]
2. ROBOT TRZYNOŻNY
Obiektem badań jest robot trzynożny z układem stabilizacji ruchu. Przyjęta struktura kinematyczna robota widoczna jest na Rys. 2. Na rysunku tym pokazano:
• układ współrzędnych związany z robotem,
• kąty: przechylenia, pochylenia i odchylenia korpusu (odpowiednio a, p, y),
• numerację poszczególnych członów,
• oznaczenia charakterystycznych punktów,
• oznaczenia kątów w parach kinematycznych.
Robot składa się z korpusu 0, trzech nóg 1-3 oraz układu stabilizacji ruchu 4. Każda z nóg składa się z trzech ruchomych członów i zawiera 3 aktywne stopnie swobody. Z kolei układ stabilizacji ruchu składa się z dwóch członów i zawiera 2 aktywne stopnie swobody.
2
Wyszukiwarka
Podobne podstrony:
Artykuł Autorski, XI Forum Inżynierskiego ProCAx cz. II, Kraków, 16-18 października 2012 r. Aktualne
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Dr inż. Mac
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Najważniejs
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Rys. 5. Sch
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Podsystem
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. W pracy ana
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Otrzymane w
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Animacja ru
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. Dr inż.
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. procedu
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. Zgodnie
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. Generow
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. chwytak
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. -
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. L 2 L
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. W model
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Trzmiel A
więcej podobnych podstron