10 2
116
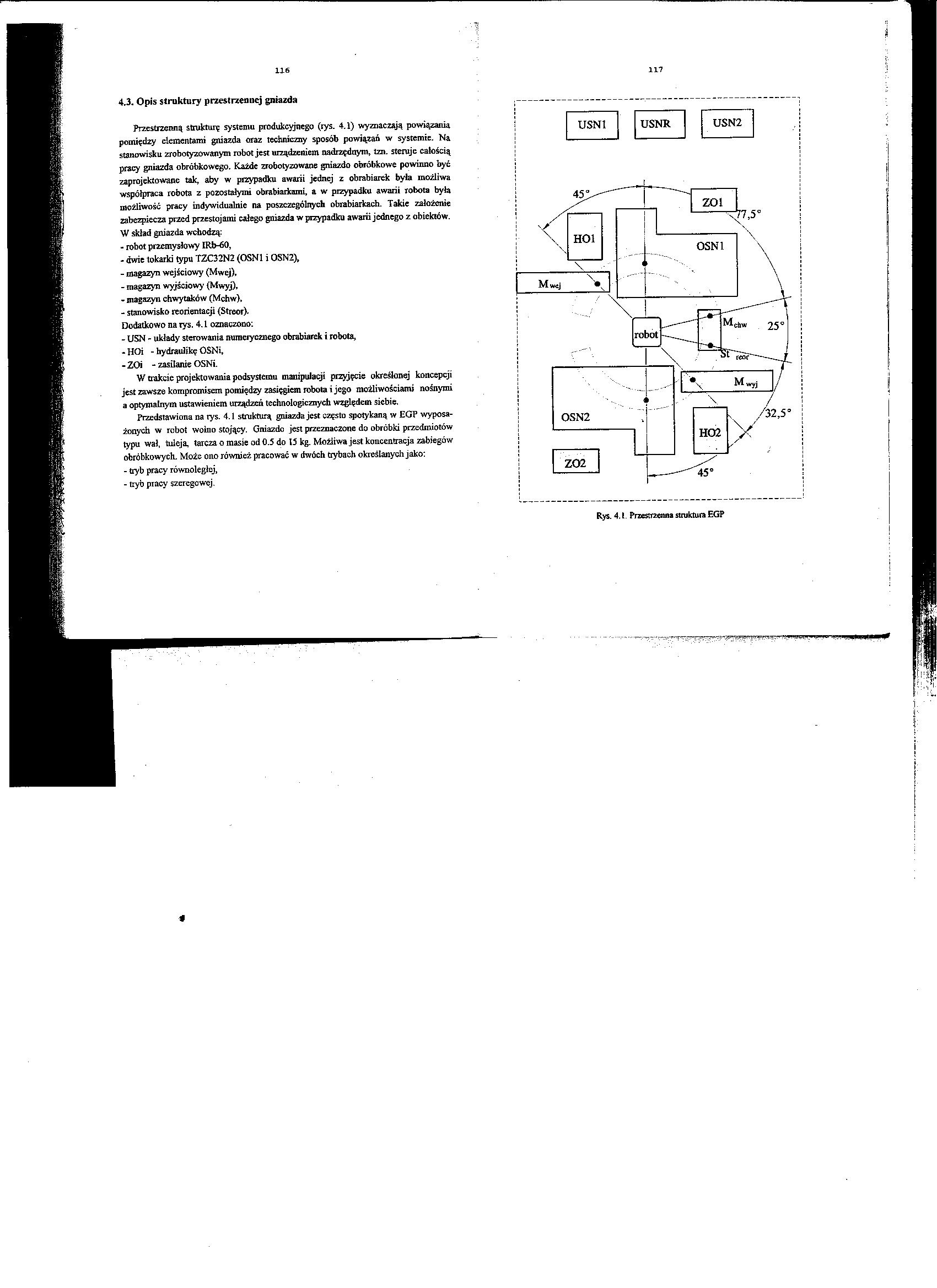
4.3. Opis struktury przestrzennej gniazda
Przestrzenną strukturę systemu produkcyjnego (rys. 4.1) wyznaczają powiązania pomiędzy elementami gniazda oraz techniczny sposób powiązań w systemie. Na stanowisku zrobotyzowanym robot jest urządzeniem nadrzędnym, tzn. steruje całością pracy gniazda obróbkowego. Każde zrobotyzowane gniazdo obróbkowe powinno być zaprojektowane tak, aby w przypadku awarii jednej z obrabiarek była możliwa współpraca robota z pozostałymi obrabiarkami, a w przypadku awarii robota była możliwość pracy indywidualnie na poszczególnych obrabiarkach. Takie założenie zabezpiecza przed przestojami całego gniazda w przypadku awarii jednego z obiektów. W skład gniazda wchodzą:
- robot przemysłowy IRb-60,
- dwie tokarki typu TZC32N2 (OSN1 i OSN2),
- magazyn wejściowy (Mwej),
- magazyn wyjściowy (Mwyj),
- magazyn chwytaków (Mchw),
- stanowisko reorientacji (Streor).
Dodatkowo na rys. 4.1 oznaczono:
- USN - układy sterowania numerycznego obrabiarek i robota,
-HOi - hydraulikę OSNi,
- ZOi - zasilanie OSNi.
W trakcie projektowania podsystemu manipulacji przyjęcie określonej koncepcji jest zawsze kompromisem pomiędzy zasięgiem robota i jego możliwościami nośnymi a optymalnym ustawieniem urządzeń technologicznych względem siebie.
Przedstawiona na rys. 4.1 strukturą gniazda jest często spotykaną w EGP wyposażonych w robot wolno stojący. Gniazdo jest przeznaczone do obróbki przedmiotów typu wał, tuleja, tarcza o masie od 0.5 do 15 kg. Możliwa jest koncentracja zabiegów obróbkowych. Może ono również pracować w dwóch trybach określanych jako:
- tryb pracy równoległej,
- tryb pracy szeregowej.
117
|
USN1 |
USNR |
USN2 |
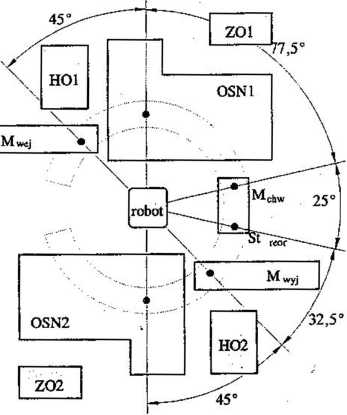
Rys. 4. ( Przestrzenna struktura EGP

Wyszukiwarka
Podobne podstrony:
Struktura systemu produkcyjnego NAKŁADY PRODUKCJA EFEKTY Zasoby kapitałowe r Zasoby
Infrastruktura systemu produkcyjnego Struktura systemu produkcyjnego Zasoby osobowe W k Zasoby
img132 132 9. Wprowadzenie do syntaktycznego rozpoznawania obrazów Rys. 9.11. Opis strukturalny scen
img071 (34) Zadanie 10. Schemat przedstawia strukturę cen w ramach obrotu towarowego. Cena
IMG951 Opis struktury wartości (indywidualny poziom analizy) MttMra (powerf wpływania na i kontrolow
IMG 10 czy ich w pełni przestrzegać, aby uniknąć trudu podejmowania pracy wychowawczej za pomocą spe
page0403 XXlif. Sądownictwo TABU 10. SKAZANI PRAWOMOCNIE WEDŁUG PRZESTĘPSTW
Slajd4 2 Opis struktur krystalicznych jest zredukowany do siedmiu różniących się kształtem komó
z budynków kampusu. budynków kampusu (10) Projekt okablowania strukturaln eg o Bazując na treści
10 (192) 31 .Rozkład przestrzenny i czasowy odpływu w Polsce W porównaniu z odpływami rzek
12966161?7710835681535?3592778 n Ola Biskup 28 min O,™ Hlll 10:00m K.© uzy mogtaDys przestać mi dan
więcej podobnych podstron