HPIM0812
5. Sterowanie robolów przemysłowych
5. Sterowanie robolów przemysłowych
łącznika K3 - linia nr 1. Zamknięcie styku K31 powoduje zamykanie chw, i jest pobierany przedmiot - linia nr 4. Po zamknięciu chwytaka, co jest syJ/? zowane łącznikiem K9, chwytak jest podnoszony do góry, aż do chwili nac% cia łącznika K5 - linia nr 5. W chwili kiedy chwytak z przedmiotem znajdy 5* w położeniu początkowym, a chwytak jest zamknięty, w linii nr 8 następ wzbudzenie stycznika SI i przesunięcie wózka w prawo, aż do chwili osiągi cia łącznika K2 - linia nr 8. Następnie, jeśli druga paleta jest wolna, kołuje opuszczana - linia nr 3. Po otwarciu chwytaka i zwolnij?
z chwytakiem jest opuszczana -
przedmiotu - linia nr 10, chwytak jest podnoszony do góry, aż do chwili
Kg
gnięcia łącznika K5 - lima nr 7. Na końcu następuje powrot do położenia starto wego - linia nr 12. Chwytak zatrzyma się po osiągnięciu łącznika KI, a cykl rozpocznie się dopiero w chwili pojawienia się kolejnego przedmiotu, ^ zapewnia automatyczną pracę robota.
W pokazanym układzie jest wykonywane działanie, które można pi^ stawić opisowo:
Linie (1,2,3) Jeżeli (KI 1 i K61 i K81 i K51 lub S31 lub K21 i K91 i nje K71 i nie K51) i nie K31 i nie K41 i nie S42 to S3 Linia (4) Jeżeli K31 i nie Sól i nie K92 to S5 Linie (5,6,7) Jeżeli (K32 i K92 lub S41 lub K52 i S32) i nie K52 i nic S32 to S4
Linie (8,9) Jeżeli (KI 1 i K93 lub SI 1) i nie S22 i nie K22 to SI Linia (10) Jeżeli K42 i nie S51 i nie K82 to S6 Linie (11 i 12) Jeżeli (S21 lub K21 i K83) i nie S12 i nie K12 to S2 Aby procesor mógł wykonać te działania, należy dokonać przekształcenia zawartych w opisie związków logicznych na ciąg rozkazów. Elementami programowania sterowników logicznych są: adresy argumentów rozkazów i symbole operacji logicznych wg reguł algebry Boole’a. Przykładowo dla sterowników przyjmuje się następujące adresy:
1 wejście (Input),
0 wyjście (Output)
oraz symbole operacji logicznych:
■ działanie typu i,
1 działanie typu lub,
/ negacja,
() nawiasy,
= wykonanie.
Wszystkie połączenia, tworzące program sterowania w przekaźnikowej wersji układu, są więc zastąpione dwoma rodzajami instrukcji:
- instrukcjami sprawdzania stanu wejścia i łączenia sygnałów wejściowych w odpowiednie warunki,
| instrukcjami wykonawczymi włączania i wyłączania wyjść.
Każdy stan określonego wyjścia musi być zaprogramowany w formie zdania logicznego, a wprowadzone instrukcje mają formę:
(111-121 123119+I05)+(113-I26-/I22/I19) Al5 /117108 = 003 U5VI I0*/I27 = 005
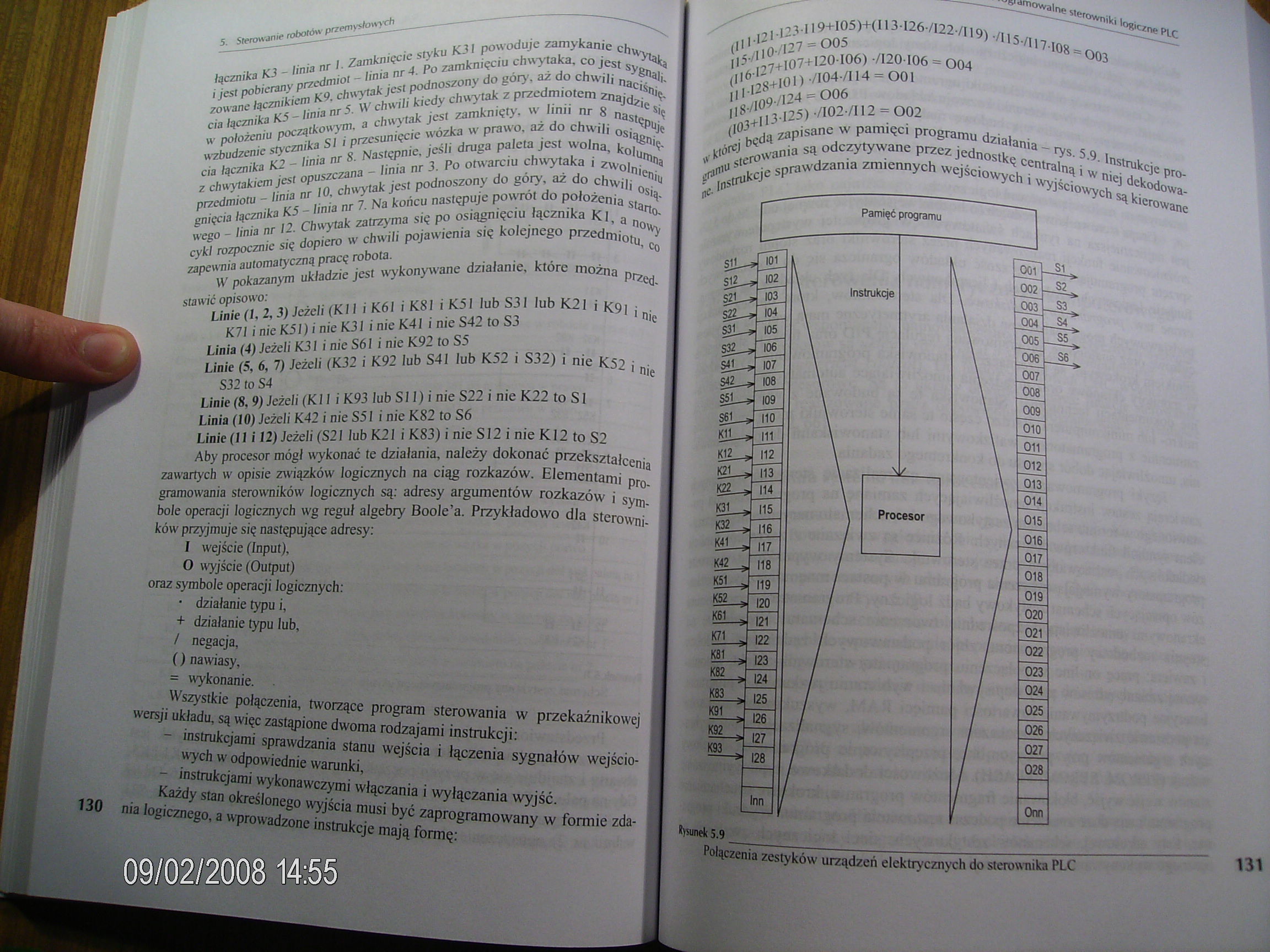
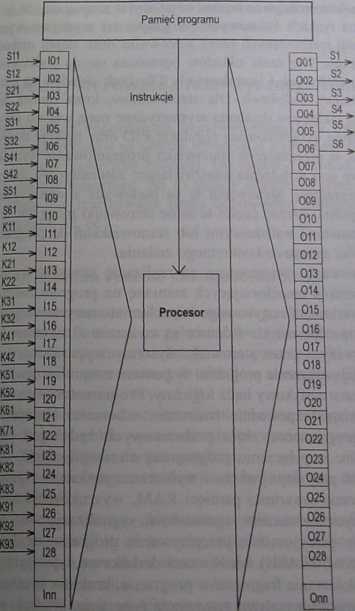
(I16 I27+I07+I20106) -/I20-I06 = 004 IIM28+I01) -/I04-/I14 = OOl II8-/I09-/I24 = 006 (I03+113-125) -A02-A12 = 002 w której będą zapisane w pamięci programu działania - rys. 5.9. Instrukcje pro-,rramu sterowania są odczytywane przez jednostkę centralną i w niej dekodowa-nCi instrukcje sprawdzania zmiennych wejściowych i wyjściowych są kierowane
Rysunek 5.9 ________
Połączenia zestyków urządzeń elektrycznych do sterownika PLC 131
Wyszukiwarka
Podobne podstrony:
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
HPIM0824 6. Napędy robolów przemytlowych 6.1. Przeznaczenie napędów i zakres ich
HPIM0830 6. Napędy robolów przemysłowych 6.4.1. Napędy prądu stałego z silnikami komutatorowymi Stos
HPIM0808 5. Sterowanie robotów piwnystowych Roboty z układami o stałym programie (tzw. pick and plac
HPIM0823 5. Slefowarw robolów przoTfyilowydi min, sokicj dokładności i optycznego żyroskopu możliwa
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
Rys. 1. Schemat sterowania silnika indukcyjnego łącznikiem stycznikowym, przedstawiony w postaci sku
Roboty przemysłowe w automatyzacji odlewmctwa ciśnieniowego. Nr 11. s. 472. Ruch cen metali przemysł
więcej podobnych podstron