HPIM0842
6. Napędy robotów przemysłowych
Możliwości zastosowania przekładni zębatkowych do zamiany r rotowego na ruch postępowy pokazano na rys. 6.3 Ic - w tym przypacjL 1,11 % być użyta zębatka lub silnie napięty pas zębaty. Inne zastosowanie Dr.U rr,°>* ni pasowej zębatej do zamiany ruchu obrotowego na postępowy pokaz rys. 6.35. 0 ^
6.5.3. Redukujące przekładnie mechaniczne
W tablicy 6.4 przedstawiono obecnie stosowane silnie redukujące przekład • mechaniczne.
Tablica 6.4. Zestawienie parametrów przekładni silnie redukujących [7]
|
1 Typ przekładni | |
Minimalne przełożenie i |
Sprawność tj |
Maksymalna prędkość obrotowa n obr/min |
Luz kątowy p |
|
1 Walcowa |
1 st. 1:10 2st. 1:30 3st 1:125 4st. 1:625 |
0.98 + 0,99 |
50 000 |
lst<3' (napięcie wstępne) |
|
1 Ślimakowa |
lat. 1:75 2st. 1:250 |
0,85 + 0,96 |
3000 |
<y |
|
1 Planetarna |
IsL 1:87 |
0,94 + 0,97 |
3000 |
<0*1/ (napięcie wstępne) <r <3' |
|
1 Falowa |
1:320 |
0,80 + 0,90 |
3000 |
[ <6' 1 <y |
|
l Cykloidalna |
Ist. 1:87 2st. 1:6000 3§t. 1:100000 |
0,80 + 0,90 |
3000 |
< & f 3', |
|
| Precesyjna |
Ut. 1:120 2st. 1:4000 |
0,60+0,70 |
2000 |
Spośród wymienionych przekładni największe zastosowanie w robotach mają przekładnie Talowe, które będą szczegółowo omówione w dalszej części podręcznika.
6.5.3.1. Przekładnie planetarne
Przekładnia planetarna składa się z kół zębatych: wewnętrznego, zewnętrznego

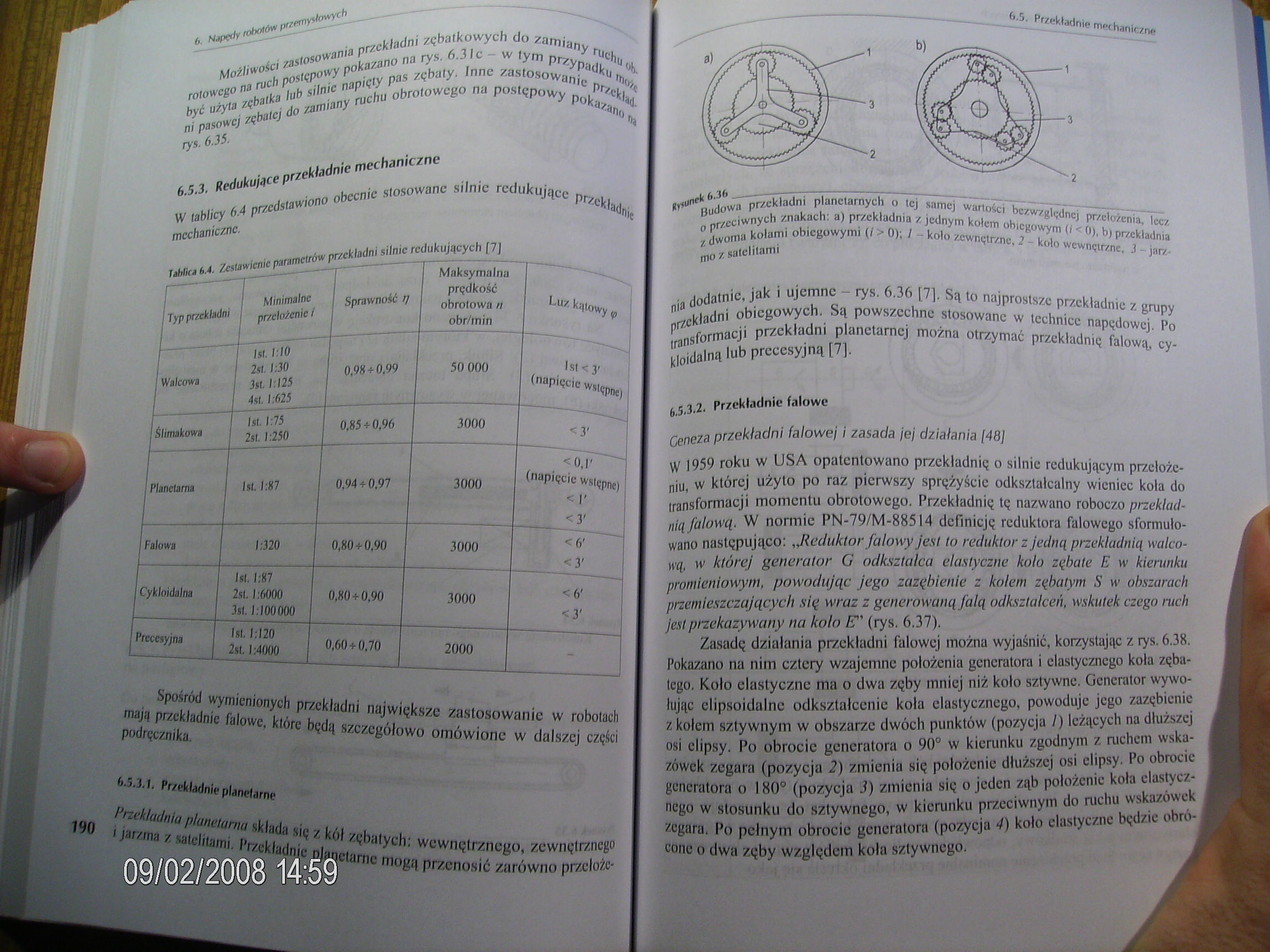
gyjifflek 6.36 . . ............... .................
Budowa przekładni planetarnych o tej samej wartości bezwzględnej przełożenia, lecz o przeciwnych znakach: a) przekładnia z jednym kołem obiegowym (i < 0), b) przekładnia z dwoma kolami obiegowymi (/ > 0); 1 - koło zewnętrzne, 2 - koło wewnętrzne, 3 - jarzmo z satelitami
nia dodatnie, jak i ujemne - rys. 6.36 [7]. Są to najprostsze przekładnie z grupy przekładni obiegowych. Są powszechne stosowane w technice napędowej. Po transformacji przekładni planetarnej można otrzymać przekładnię fałową, cy-kloidainą lub precesyjną [7j.
6,5.3.2. Przekładnie falowe
Geneza przekładni falowej i zasada jej działania [48]
W1959 roku w USA opatentowano przekładnię o silnie redukującym przełożeniu, w której użyto po raz pierwszy sprężyście odkształcałny wieniec kola do transformacji momentu obrotowego. Przekładnię tę nazwano roboczo przekładnią falową. W normie PN-79/M-88514 definicję reduktora fałowego sformułowano następująco: Reduktor falowy jest to reduktor z jedną przekładnią walcową, w której generator G odkształca elastyczne kolo zębate E w kierunku promieniowym, powodując jego zazębienie z kołem zębatym S w obszarach przemieszczających się wraz z generowaną falą odkształceń, wskutek czego ruch Jest przekazywany na kolo £” (rys. 6.37).
Zasadą działania przekładni falowej można wyjaśnić, korzystając z rys. 6.38. Pokazano na nim cztery wzajemne położenia generatora i elastycznego kola zębatego. Koło elastyczne ma o dwa zęby mniej niż koło sztywne. Generator wywołując elipsoidalne odkształcenie koła elastycznego, powoduje jego zazębienie z kołem sztywnym w obszarze dwóch punktów (pozycja I) leżących na dłuższej osi elipsy. Po obrocie generatora o 90° w kierunku zgodnym z ruchem wskazówek zegara (pozycja 2) zmienia się położenie dłuższej osi elipsy. Po obrocie generatora o 180° (pozycja 3) zmienia się o jeden ząb położenie kola elastycznego w stosunku do sztywnego, w kierunku przeciwnym do ruchu wskazówek zegara. Po pełnym obrocie generatora (pozycja 4) koło elastyczne będzie obtó cone o dwa zęby względem kola sztywnego.
Wyszukiwarka
Podobne podstrony:
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
P1080288 7. Napędy robotów przemysłowych Przekładnie linowe są stosowane w robotach jako układy w za
P1080292 7. Napędy robotów przemysłowych Wskaźnik materiałochłonności typowej przekładni falowej ogó
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
więcej podobnych podstron