HPIM0898
10. Zastosowania robotów przemysłowych
10. Zastosowania robotów przemysłowych

5
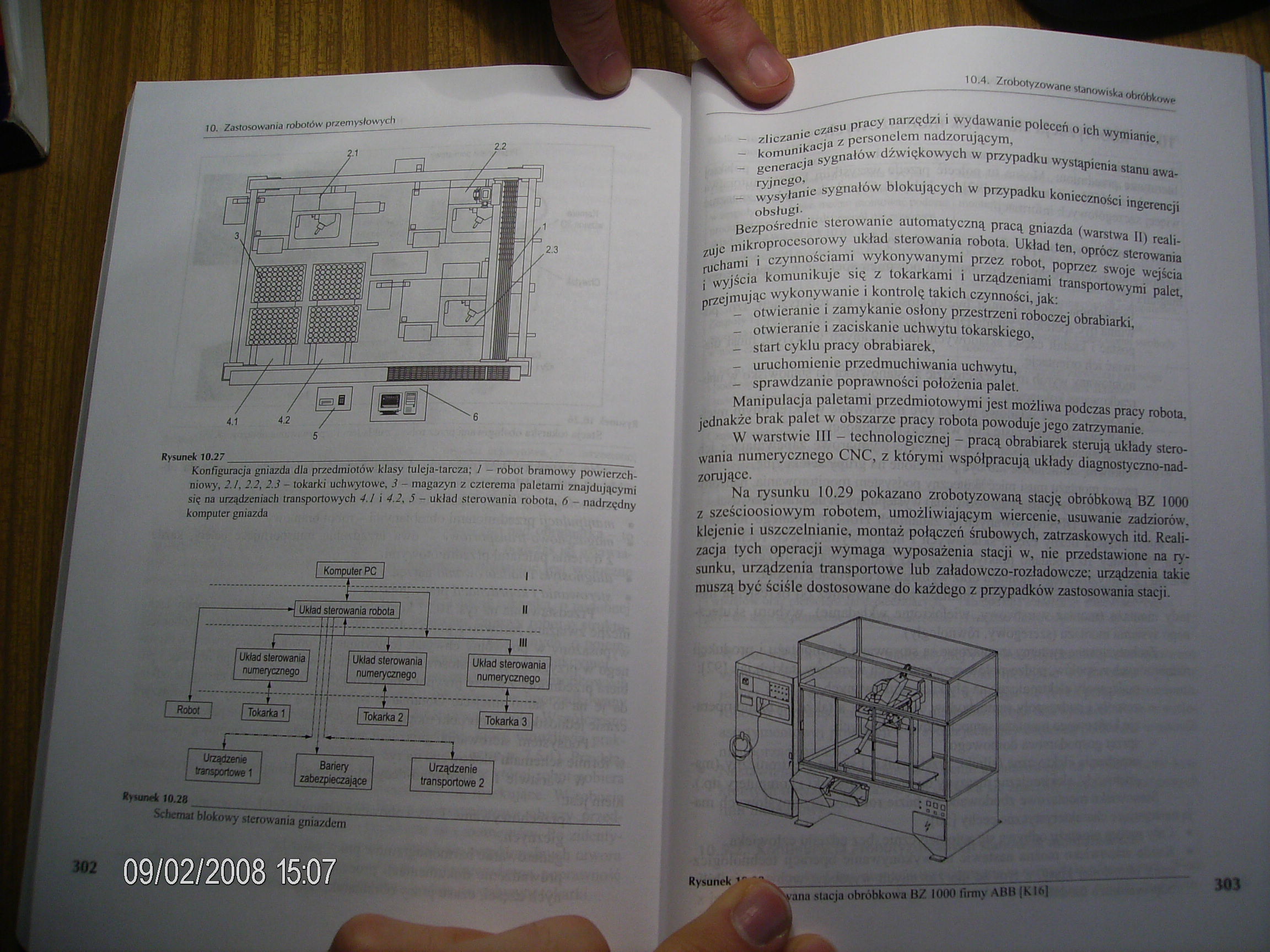
Rysunek 10.27_________
Konfiguracja gniazda dla przedmiotów klasy tuleja-tarcza; J - robot bramowy powierzchniowy, 2.1,2.2,2.3 - tokarki uchwytowe, 3 - magazyn z czterema paletami znajdującymi się na urządzeniach transportowych 4.1 i 4.2, 5 - układ sterowania robota, 6 - nadrzędny komputer gniazda
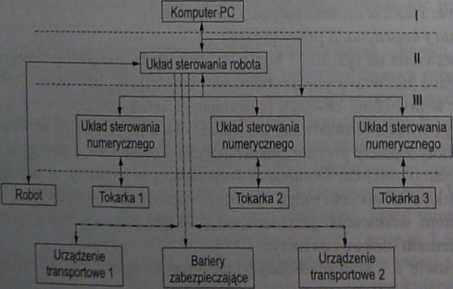
Schemat blokowy sterowania gniazdem
Rysunek 10.28
oracy narządzi i wydawanie poleceń o ich wymianie,
j nadzorującym,
generacja' sygnałów dźwiękowych w przypadku wystąpienia stanu awa-
| - wysyfanie sygnałów blokujących w przypadku konieczności ingerencji obsługi.
Bezpośrednie sterowanie automatyczną pracą gniazda (warstwa II) realizuje mikroprocesorowy układ sterowania robota. Układ ten, oprócz sterowania ruchami i czynnościami wykonywanymi przez robot, poprzez swoje wejścia i wyjścia komunikuje się z tokarkami i urządzeniami transportowymi palet, przejmując wykonywanie i kontrolą takich czynności, jak:
| - otwieranie i zamykanie osłony przestrzeni roboczej obrabiarki,
- otwieranie i zaciskanie uchwytu tokarskiego,
" - start cyklu pracy obrabiarek,
- uruchomienie przedmuchiwania uchwytu,
- sprawdzanie poprawności położenia palet.
Manipulacja paletami przedmiotowymi jest możliwa podczas pracy robota, jednakże brak palet w obszarze pracy robota powoduje jego zatrzymanie.
W warstwie III - technologicznej - pracą obrabiarek sterują układy sterowania numerycznego CNC, z którymi współpracują układy diagnostyczno-nad-zorującc.
Na rysunku 10.29 pokazano zrobotyzowaną stację obróbkową BZ 1000 z sześcioosiowym robotem, umożliwiającym wiercenie, usuwanie zadziorów, klejenie i uszczelnianie, montaż połączeń śrubowych, zatrzaskowych itd. Realizacja tych operacji wymaga wyposażenia stacji w, nie przedstawione na rysunku, urządzenia transportowe lub załadowczo-rozładowcze; urządzenia takie muszą być ściśle dostosowane do każdego z przypadków zastosowania stacji.
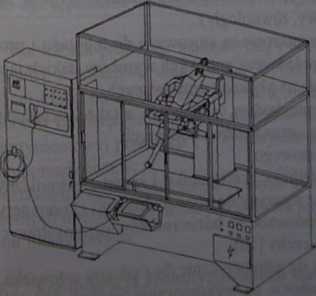
^j^brtbkowiBZ 1000fumy ABB|KI6l
Rysunek

Wyszukiwarka
Podobne podstrony:
HPIM0891 10. Zastosowania robotów przemysłowych Rysunek -—----— Analiza
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
HPIM0897 ■ 10. Zaścósovvahia robotów przemysłowych Rysunek
HPIM0893 10. ZmoMMMflu robotów pnrmysbwyth itopiony i wydmuchany za pomocą gazów poprzez szczelinę D
32534 P1080365 13. Zastosowania robotów przemysłowych Rysunek 13.9_____________ Algorytm prac) stan
52317 P1080391 13. Zastosowania robotów przemysłowych Rysunek 13*50___ Robot bramowy w zrobotyzowany
P1080384 13. Zastosowania robotów przemysłowych Rysunek 13.45________ Moduły robotów bramowych
P1080393 13. Zastosowania robotów przemysłowych Rysunek 13.55 Roboty pałetyzujące firmy Famie [255]
P1080392 13. Zastosowania robotów przemysłowych Rysunek 13.52 _ ,v. « o. • ..
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
więcej podobnych podstron