52317 P1080391

13. Zastosowania robotów przemysłowych
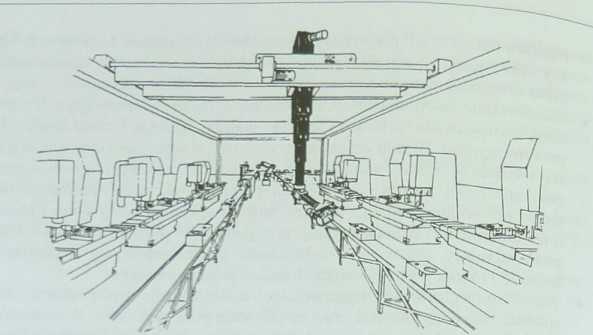
Rysunek 13*50___
Robot bramowy w zrobotyzowanym systemie montażowym [80]
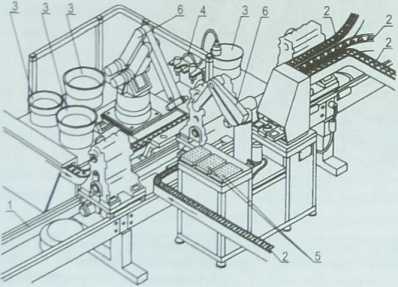
Rysunek 13.51
Zrobotyzowany system montażu silników samochodowych; / — przenośnik główny, 2 — przenośniki pomocnicze, 3 - podajniki wibracyjne, 4 - stojak do automatycznej wymiany narzędzi, 5 - kasety z częściami do montażu, 6 - roboty montażowe [75]
Zrobotyzowany system montażowy z dwoma robotami do montażu silników spalinowych przedstawiono na rys. 13.51. Stanowi on element linii montażowej. Blok cylindrów jest przemieszczany na paletowym wózku transporto-424 wym. Roboty mają swobodny dostęp do podzespołów dostarczanych przez
pomocnicze przenośniki. Podajniki wibracyjne podają i (śruby, podkładki itp.). Dzięki oprogramowaniu roboty matycznej wymiany narzędzi lub chwytaków.
orientują ma\e części mają możliwość auto-
13.6. Zrobotyzowane stanowiska manipulacji i paletyzacji
W zadaniach manipulacji typowe czynności wykonywane przez roboty to [13 Ij:
— paletyzacja i depaletyzacja,
— wypełnianie pojemników i pakowanie skrzyń,
— sortowanie,
— podawanie części,
— składowanie/wyszukiwanie.
Jednym z typowych zastosowań robotów przemysłowych jest paletyzacja wyrobów, czyli układanie ich na paletę w określony sposób, przy czym asortyment paletyzowanych wyrobów jest wyraźnie zróżnicowany. W przemyśle paletyzacja odbywa się zwykle na standardowej europal ecie, a wysokość paletyzacji nie przekracza zwykle 2800 mm. Proces odbywa się z prędkością od kilkudziesięciu do kilku tysięcy opakowań na godzinę. Ze względu na monotonnośó czynności, ciężar przenoszonych elementów i powtarzalność prac przy paletyzacji stosowanie robota jest uzasadnione.
Zrobotyzowana paletyzacja pozwala na oszczędności, zwłaszcza w sferze logistyki. Wzorowo ułożone pudełka i worki na palecie, niewystające poza jej obrys, są znacznie mniej podatne na uszkodzenia w czasie załadunku lub transportu, przez co uzyskuje się widoczną redukcję wskaźnika zwrotu uszkodzonych wyrobów, a za tym idą oszczędności pieniężne. Warto pamiętać, zwłaszcza że przyjęło się, iż już jedno uszkodzone opakowanie na europalecie pozwala odbiorcy na jej zwrot gwarancyjny.
Jednym z przykładów jest stanowisko do paletyzacji cegieł przedstawione na rys. 13.52.
Innym zadaniem robota może być ustawienie cegieł na wozach piecowych w odpowiednie stosy i potem ich rozładunek. Stos taki wjeżdża do pieca na wozie piecowym, gdzie odbywa się wypalanie cegieł. Każdy rodzaj cegły wymaga ułożenia wg innego wzoru. Dzięki zastosowaniu odpowiedniego wzoru stosu zapewnią się odpowiednie wypalenie każdej z cegieł, a co za tym idzie odpowiedni jej jakość. Każdy błąd w ułożeniu stosu może spowodować spadek jakości produktu a w skrajnym przypadku bardzo kosztowne w skutkach samotne przewrócenie się stosu wewnątrz pieca. sam°
W wielu branżach przemysłowych są stosowane v„elniania pojemników i kartonów z różnymi \vvrdham ryzowane systemy wkładanie butelek do skrzynek (rys 13 53) y Przykładem może
425
Wyszukiwarka
Podobne podstrony:
32534 P1080365 13. Zastosowania robotów przemysłowych Rysunek 13.9_____________ Algorytm prac) stan
P1080384 13. Zastosowania robotów przemysłowych Rysunek 13.45________ Moduły robotów bramowych
P1080393 13. Zastosowania robotów przemysłowych Rysunek 13.55 Roboty pałetyzujące firmy Famie [255]
P1080392 13. Zastosowania robotów przemysłowych Rysunek 13.52 _ ,v. « o. • ..
HPIM0891 10. Zastosowania robotów przemysłowych Rysunek -—----— Analiza
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
więcej podobnych podstron