12883 P1080363

13. Zastosowania robotów przemysłowych
- łuk utrzymuje się między dwoma elektrodami i jest z przedmiot
związany, etTV TUft~
- łuk utrzymuje się między elektrodami i spawanym przedmiotem (Spa
nie prądem trójfazowym"), p a'
• odmienności stosowanych rodzajów elektrod, a mianowicie:
— węglowych,
- metalowych nietopliwych (wolframowych),
- metalowych topliwych (druty Ute i proszkowe, elektrody otulone"),
• odmienności atmosfer, w których łuk się utrzymuje:
— w powietrzu,
— w gazach osłonowych,
— pod wodą.
W zrobotyzowanej technice spawalniczej są stosowane przede wszystkim \ następujące metody: \
• M1G/MAG,
| TIG.
Metoda MIG/MAG jest to spawanie łukowe elektrodątopliwąw osłonach gazowych. Istotę metody przedstawiono na rys. 13.5. ‘Nawinięty na szpulę drut elektrodowy jest podawany za pomocą podajnika drutu do obszaru spawania. Stapiający się drut stanowi elektrodę. Doprowadzenie prądu do drutu elektrodowego następuje za pomocą styku prądowego. Spawanie jest prowadzone najczęściej prą dem stałym z biegunowością dodatnią (plus na elektrodzie) lub prądem przemiennym. Między elektrodą a materiałem spawanym jarzy się luk elektryczny. Obszar luku jest chroniony doprowadzanym przez dyszę gazem osłonowym. metodzie MIG jest stosowany gaz obojętny, niezawierający tlenu. 'Najczęściej jest stosowany argon o wysokim stopniu czystości (99,996%'). Metodą tą można spawać aluminium i jego stopy oraz stale szlachetne. W metodzie MAG jest stosowany aktywny gaz. ochronny, zawierający tlen (C02 lub mieszanka C02 + argon). Mieszanka gazowi zapewnia prawie bezodpryskowe spawanie. Metoda ta jest stosowana prze^ wszystkim do spawania stali nisko węglowych i stali niskostopowyćh.
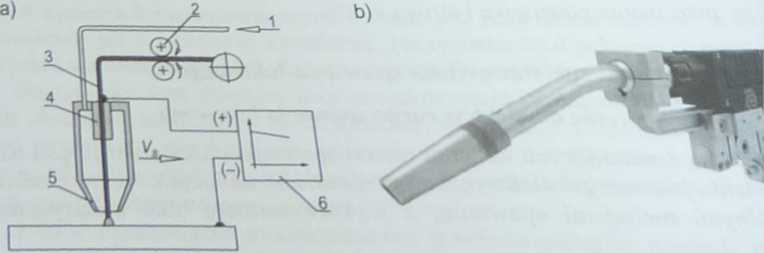
Rysunek 13.5______
gw ochronny, 2 - rolki prze prądu, b) widok końcówki spa\
Spawanie metodą MIG/MAG: a) schemat; i -3 - drut, 4 - styk prądowy, 5 - dysza, 6 - źródło
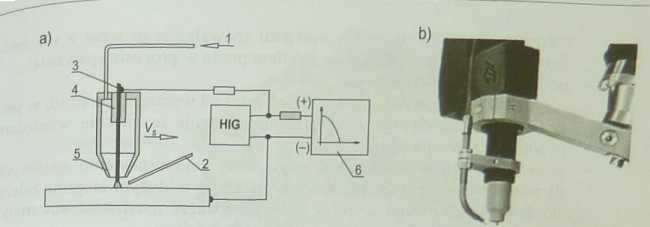
Rysunek 13.6__________
Spawanie metodą TIG: a) schemat; 1 - gaz ochronny, 2 — spoiwo, 3 — elektroda wolframowa, 4 — styk prądowy, 5 — dysza, 6 — źródło prądu, HIG - generator wysokiej częstotliwości, b) widok końcówki spawalniczej
W metodzie TIG łuk elektryczny, zasilany prądem przemiennym lub stałym, jarzy się między materiałem spawanym a zamocowaną w uchwycie spawalniczym elektrodą wolframową, powodując jednocześnie stopienie się materiału podstawowego i automatycznie podawanego spoiwa (rys. 13.6). Strumień argonu przepływający wokół elektrody stanowi osłonę zabezpieczającą jeziorko płynnego metalu i spoiwa przed działaniem otaczającej atmosfery. Metoda ta jest stosowana przede wszystkim do spawania aluminium, miedzi i stali wysoko-stopowych. Spawanie może odbywać się bez dodatku spoiwa albo też z jego dodatkiem. Spawanie bez dodatku spoiwa stosuje się do łączenia cienkich elementów i wówczas spoina tworzy się z brzegów stopionego materiału. W przypadku łączenia elementów grubszych oraz ukosowania brzegów do spawania stosuje się materiał dodatkowy w postaci drutu lub prętów. Jako gaz ochronny jest stosowany prawie wyłącznie argon, którego czystość powinna wynosić co najmniej 99,98%. W ostatnich latach obserwuje się tendencję do stosowania w spawaniu metali lekkich mieszanki argonu z helem, umożliwiającej uzyskanie szerszego i głębszego wtopienia.
Spawanie metodą TIG jest stosowane głównie do łączenia aluminium i jego stopów, miedzi i stali wysokostopowych. Zalecane również bywa do precyzyjnego układania pierwszej warstwy spoiny w złączach rur pracujących w warunkach wysokich ciśnień i temperatur.
13.2.1.2. Budowa zrobotyzowanych stanowisk spawalniczych
Każde zrobotyzowane stanowisko do spawania łukowego ma indywidualny charakter, zależnie od zadania technologicznego. Typowe zrobotyzowane stanowisko składa się z następujących elementów wyposażenia [131]:
- robota, który powinien charakteryzować się odpowiednią do zadania liczbą stopni swobody, przestrzenią roboczą oraz dokładnością i powtarzalnością pozycjonowania;
371
Wyszukiwarka
Podobne podstrony:
P1080373 13. Zastosowania robotów przemysłowych Obecnie zarysowują się wyraźnie następujące kierunki
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron