P1080384

13. Zastosowania robotów przemysłowych
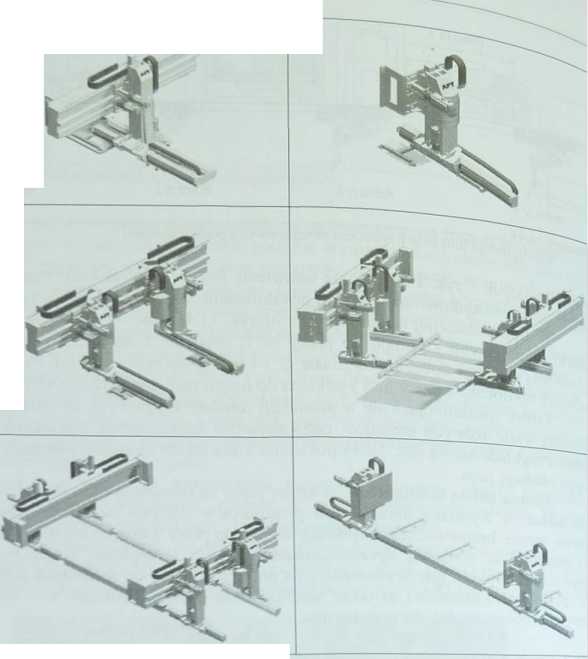
Rysunek 13.45________
Moduły robotów bramowych automatyzujących obsługę pras [215]
Do chwytania elementów podawanych na prasy tłoczące na zimno najczęściej używa się chwytaków przyssawkowych, z jedną lub kilkoma przyssawkam (do chwytania arkuszy blach). Oferta przyssawek różnych firm jest bardzo boga ta, więc można wybrać odpowiedni kształt, właściwą średnicę, rodzaj materiah itp. Podciśnienie w przyssawkach najczęściej jest wytwarzane w indywidualnych eżektorach (zagadnienia te omówiono w rozdz. 8).
Po ukształtowaniu wytłoczki może zachodzić potrzeba innego usytuowania przyssawek albo wymiany chwytaka, która może być dokonywana automaj tycznie. Ze względu na rosnące wymagania elastyczności linii pras problem ten 410 jest bardzo ważny i poświęca się mu coraz więcej uwagi. Identyczne robota
pracujące w linii pras są wyposażone w różne urządzenia chwytające, przystosowane do kolejnych zmian kształtu wytłoczki.
Do chwytania drobnych ferromagnetycznych elementów zwykle są stosowane chwytaki elektromagnetyczne. Rzadko używa się chwytaków mechanicznych ze sztywnymi końcówkami chwytnymi.
Do podawania przedmiotów rozgrzanych w piecu na prasy tłoczące na gorąco są stosowane chwytaki mechaniczne z równoległym prowadzeniem szczęk i o siłowym oddziaływaniu na obiekt.
W ogólnym przypadku pobranie obiektu manipulacji może być związane z koniecznością określenia jego pozycji i zorientowania, identyfikacją jego kształtu, rozpoznaniem płaszczyzny styku chwytaka z powierzchnią obiektu, z koniecznością wykonywania ruchów korekcyjnych chwytaka, w celu jego właściwego ustawienia względem obiektu manipulacji. Bardzo istotne jest zatem zapewnienie powtarzalnego, prawidłowego materiału wejściowego pod względem: powtarzalności wymiarowej, grubości blachy, gratu na krawędziach wykroju, jakości powierzchni blachy (bez nadmiernego zaolejania i zanieczyszczeń).
Warunki dynamiczne procesu manipulacji wpływają na proces chwytania w ten sposób, że wypadkowa sił działających na obiekt w czasie wykonywania złożonych ruchów może zmieniać zarówno swą wartość, jak i kierunek - jest to związane z rodzajem wykonywanych ruchów oraz z wartościami przyspieszeń. Poprawne uchwycenie oznacza unieruchomienie obiektu w najbardziej niekorzystnych warunkach dynamicznych.
Rozdzielanie arkuszy blach
Dobór metody rozdzielenia arkuszy blach zależy od rodzaju materiału i jego grubości. Stosowane są następujące rozwiązania [5].
- magnetyczne rozdzielacze blach,
- rozdzielanie arkuszy za pomocą sprężonego powietrza,
- mechaniczne rozdzielanie,
- sensory do pomiaru grubości uchwyconego elementu.
Do rozdzielenia cienkich stalowych arkuszy stosuje się najczęściej separatory elektromagnetyczne, tzw. magnetyczne rozdzielacze blach. Zapewniają one dużą energię pola magnetycznego wnikającego do blach i związaną z tym dużą siłę rozdzielającą blachy, która powoduje odgięcie krawędzi pojedynczego arkusza na stosie - powstająca szpara między arkuszami umożliwia ich rozdzielenie.
Stosowane są także systemy rozdzielania arkuszy za pomocą sprężonego powietrza. które jest podawane pomiędzy arkusze.
Mechaniczny sposób rozdzielania arkuszy polega na wciskaniu narzędzia z boku stosu, powodując uniesienie arkusza.
Układy sensoryczne
anej obsłudze
pras mają zastosowanie w na-
uklady sensoryczne w zrobotyzow sięPujyych ,azach procesu [5]:
411
Wyszukiwarka
Podobne podstrony:
58169 P1080379 a Zastosowania tobołów przemysłowych -- Rysunek 13.34 __ Autonomicz
32534 P1080365 13. Zastosowania robotów przemysłowych Rysunek 13.9_____________ Algorytm prac) stan
52317 P1080391 13. Zastosowania robotów przemysłowych Rysunek 13*50___ Robot bramowy w zrobotyzowany
P1080393 13. Zastosowania robotów przemysłowych Rysunek 13.55 Roboty pałetyzujące firmy Famie [255]
P1080392 13. Zastosowania robotów przemysłowych Rysunek 13.52 _ ,v. « o. • ..
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
więcej podobnych podstron