P1080280
7. Napędy robotów przemysłowych
Rysunek"/' \ ______
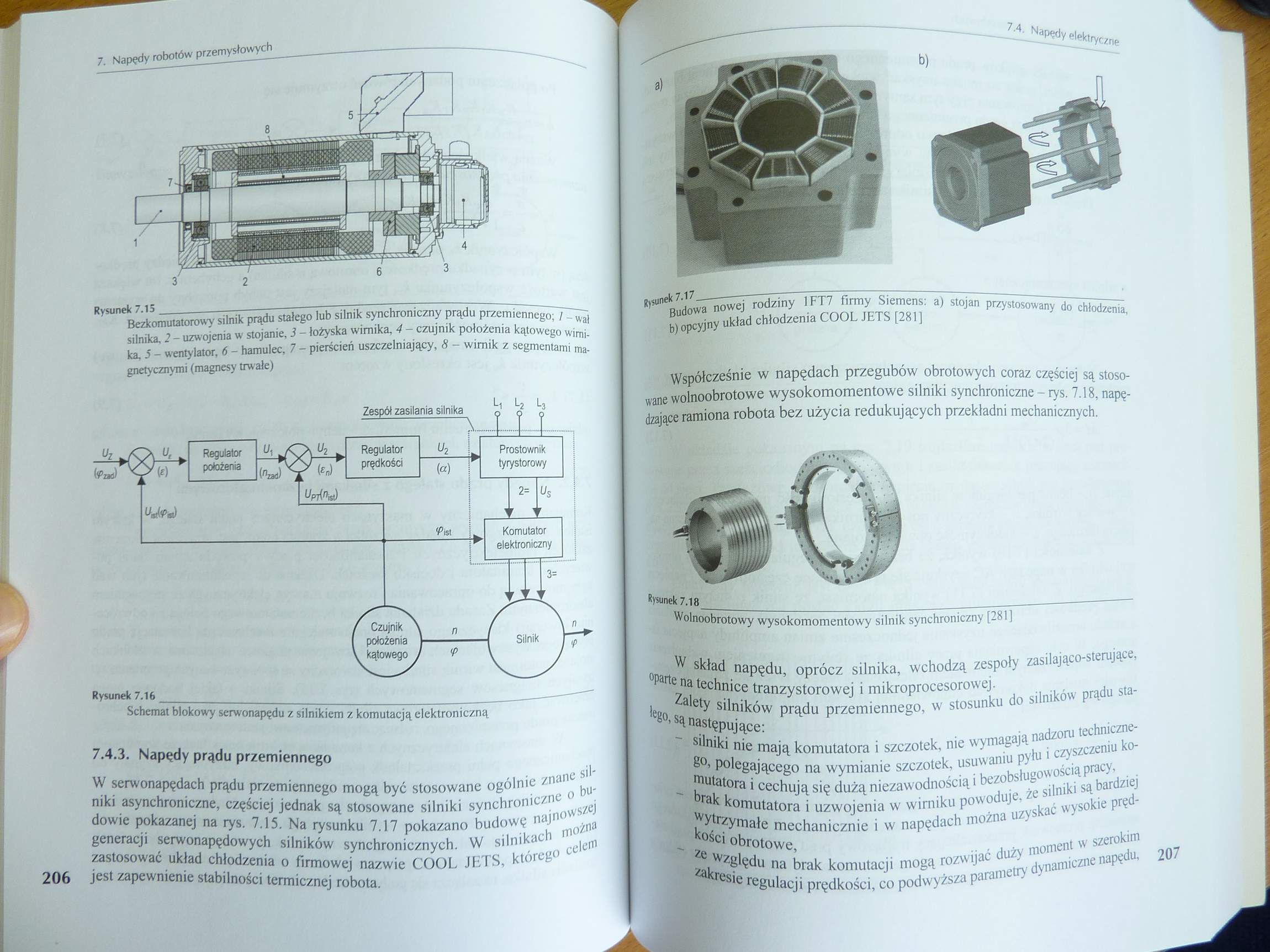
Bezkomulatorowy silnik prądu stałego lub silnik synchroniczny prądu przemiennego; 1 - wał silnika, 2 - uzwojenia w stojanie, 3 - łożyska wirnika, 4 - czujnik położenia kątowego wirnika, 5 - wentylator, 6 - hamulec, 7 - pierścień uszczelniający, 8 - wirnik z segmentami magnetycznymi (magnesy trwałe)
Rysunek 7,16 ___
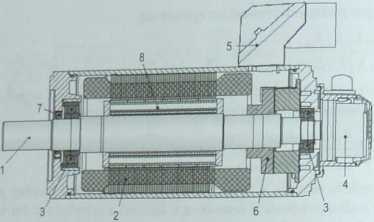
Schemat blokowy serwonapędu z silnikiem z komutacją elektroniczną
7.4.3. Napędy prądu przemiennego
W serwonapędach prądu przemiennego mogą być stosowane ogólnie znane silniki asynchroniczne, częściej jednak są stosowane silniki synchroniczne o budowie pokazanej na rys. 7.15. Na rysunku 7.17 pokazano budowę najnowszej generacji serwonapędowych silników synchronicznych. W silnikach można zastosować układ chłodzenia o firmowej nazwie COOL JETS, którego celem jest zapewnienie stabilności termicznej robota.

Rysunek 7.17^——----
Budowa nowej rodziny 1FT7 firmy Siemens: a) stojan przystosowany do chłodzenia, b) opcyjny układ chłodzenia COOL JETS [281]
Współcześnie w napędach przegubów obrotowych coraz częściej są stosowane wolnoobrotowe wysokomomentowe silniki synchroniczne - rys. 7.18, napędzające ramiona robota bez użycia redukujących przekładni mechanicznych.

Rysunek 7.18^_
Wolnoobrotowy wysokomomentowy silnik synchroniczny [281]
W skład napędu, oprócz silnika, wchodzą zespoły zasilająco-sterujące, oparte na technice tranzystorowej i mikroprocesorowej.
Zalety silników prądu przemiennego, w stosunku do silników prądu stałego, są następujące:
- silniki nie mają komutatora i szczotek, nie wymagają nadzoru technicznego polegającego na wymianie szczotek, usuwaniu pyłu i czyszczeniu komutatora i cechują się dużą niezawodnością i bezobsługowością pracy,
- brak komutatora i uzwojenia w wirniku powoduje, że silniki są bardziej wytrzymałe mechanicznie i w napędach można uzyskać wysokie prędkości obrotowe,
~ ze względu na brak komutacji mogą rozwijać duży moment w szerokim zakresie regulacji prędkości, co podwyższa parametry dynamiczne napędu, 207
Wyszukiwarka
Podobne podstrony:
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
78152 P1080274 7, Napędy robotów przemysłowych Rysunek 7;7 , ^ - . •- - • &nb
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
więcej podobnych podstron