P1080200
3. Budowa robolów przemysłowych
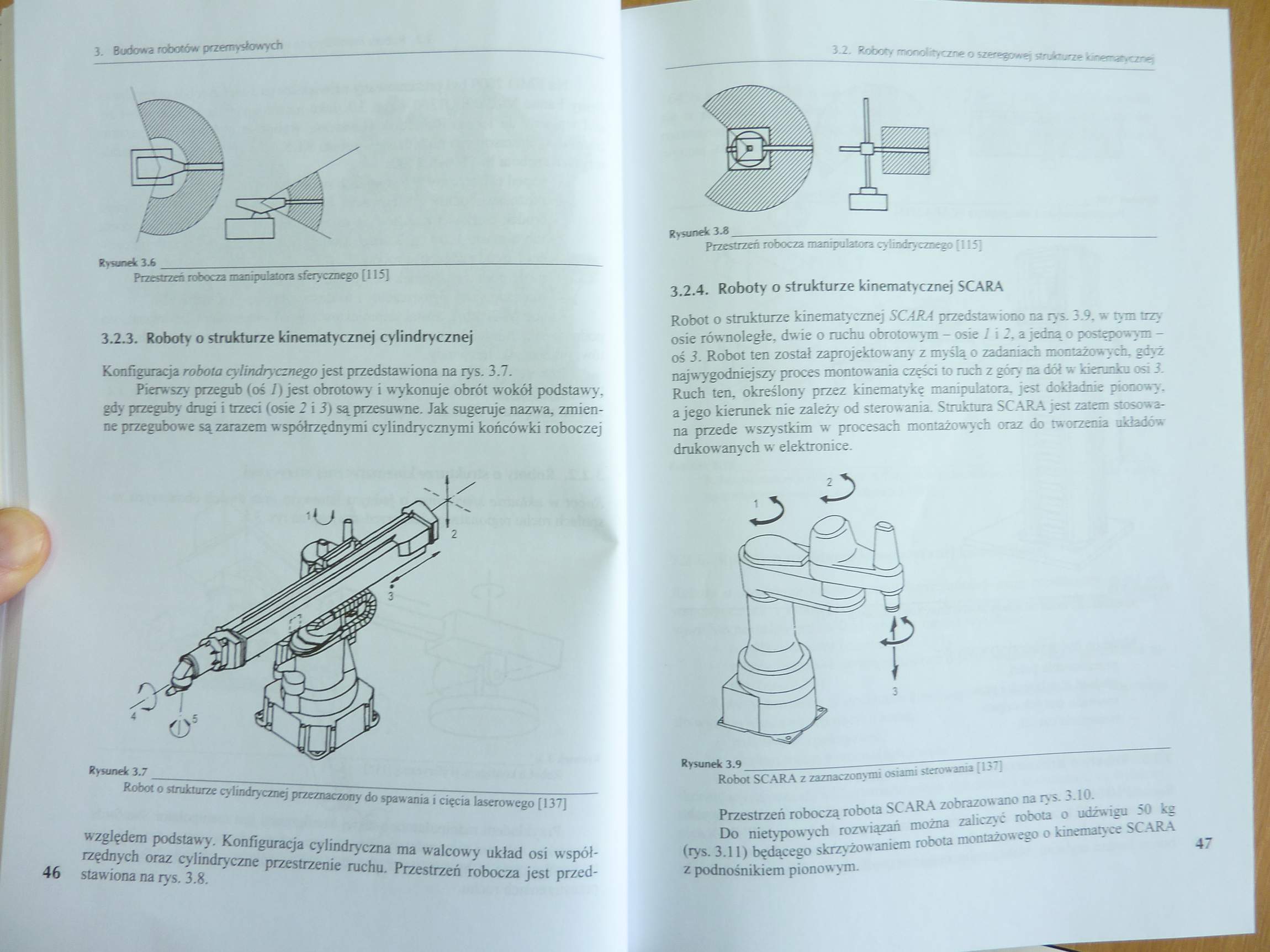
Rysunek 3.6_
PnwiiOT robocza manipnlainra sferycznego [115]
3.2.3. Roboty o strukturze kinematycznej cylindrycznej
Konfiguracja robola cylindrycznego jest przedstawiona na rys. 3.7.
Pierwszy przegub (oś 1) jest obrotowy i wykonuje obrót wokół podstawy, gdy przeguby drugi i trzeci (osie 2 i 3) są przesuwne. Jak sugeruje nazwa, zmienne przegubowe są zarazem współrzędnymi cylindrycznymi końcówki roboczej
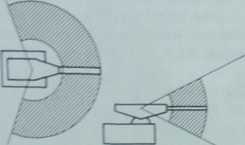
Rysunek 3.7____
Robot o strukturze cylindrycznej przeznaczony do spawania i cięcia laserowego [137]
względem podstawy. Konfiguracja cylindryczna ma walcowy układ osi współrzędnych oraz cylindryczne przestrzenie ruchu. Przestrzeń robocza jest przedstawiona na rys. 3.8.
Rysunek ŁS___
Przestrzeń robocza manipulatora cylindrycznego [115] "
3.2.4. Roboty o strukturze kinematycznej SCARA
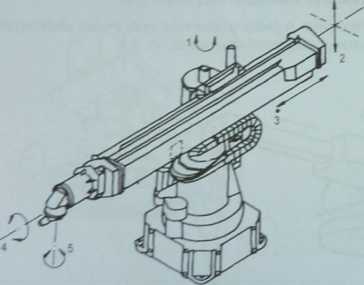
Robot o strukturze kinematycznej SCARA przedstawiono na rys. 3.9 w tvm trzv osie równoległe, dwie o niebu obrotowym - osie i i 2, a jedna o postępowym — oś 3. Robot ten został zaprojektowany z myślą o zadanńyfa montażowych. ”edvż najwygodniejszy proces montowania części to rucb z góry na dół w osi 5.
Ruch ten, określony przez kinematykę manipulatora, jest dokładnie pionowy, a jego kierunek nie zależy od sterowania. Struktura SCARA jest zatem stosow ana przede wszystkim w procesach montażowych oraz do tworzenia okładów drukowanych w elektronice.
Rysunek^_
Robot SCARA z zaznaczonymi osiami sterowania [13'
Przestrzeń roboczą robota SCARA zobrazowano na rys. 3.10.
Do nietypowych rozwiązań można zaliczyć robota o udźwigu 50 kg (rys. 3.11) będącego skrzyżowaniem robota montażowego o kinematyce SCARA z podnośnikiem pionowym.
Wyszukiwarka
Podobne podstrony:
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
87439 P1080216 3. Budowa robotów przemysłowych Rysunek3.42 -
P1080212 3. Budowa robotów przemysłowych Platforma Rysunek 3.34_ Platforma Stewarta [ 107] Platforma
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
więcej podobnych podstron