P1080252
5. Sterowanie robotów przemysłowych
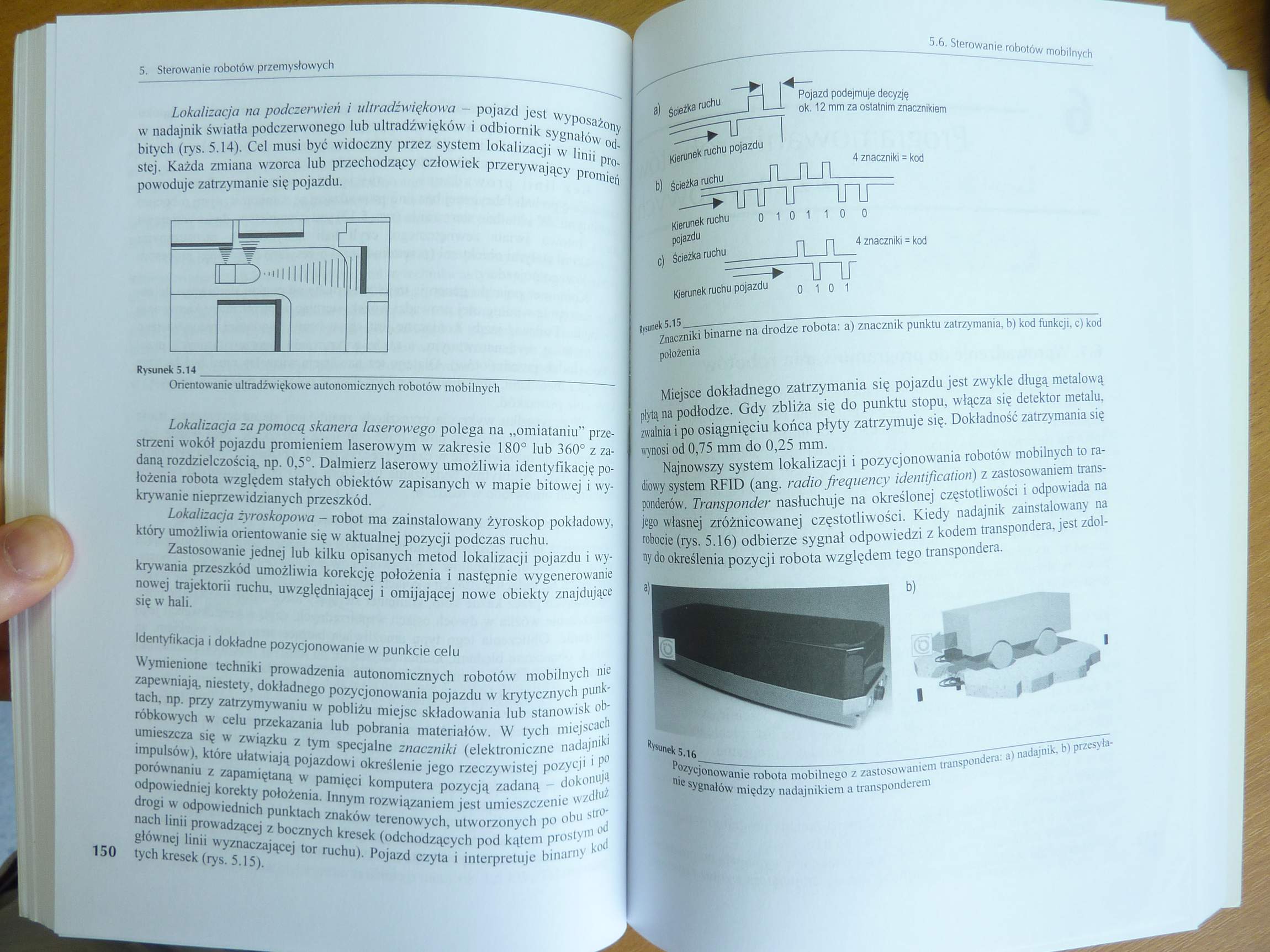
Lokalizacja na podczerwień i ultradźwiękowa - pojazd jest wyposażona w nadajnik światła podczerwonego lub ultradźwięków i odbiornik sygnałów od-] bitych (rys. 5.14). Cel musi być widoczny przez system lokalizacji w linii proJ stej. Każda zmiana wzorca lub przechodzący człowiek przerywający promiem powoduje zatrzymanie się pojazdu.
Rysunek 5.tjir_
Orientowanie ultradźwiękowe autonomicznych robotów mobilnych
Lokalizacja za pomocą skanera laserowego polega na „omiataniu” przestrzeni wokół pojazdu promieniem laserowym w zakresie 180° lub 360° z zadaną rozdzielczością, np. 0,5°. Dalmierz laserowy umożliwia identyfikację położenia robota względem stałych obiektów zapisanych w mapie bitowej i wykrywanie nieprzewidzianych przeszkód.
Lokalizacja żyroskopowa - robot ma zainstalowany żyroskop pokładowy, który umożliwia orientowanie się w aktualnej pozycji podczas mchu.
Zastosowanie jednej lub kilku opisanych metod lokalizacji pojazdu i wykrywania przeszkód umożliwia korekcję położenia i następnie wygenerowanie nowej trajektorii ruchu, uwzględniającej i omijającej nowe obiekty znajdujące się w hali.
Identyfikacja i dokładne pozycjonowanie w punkcie celu
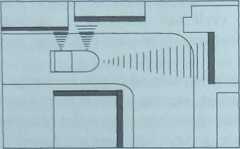
Wymienione techniki prowadzenia autonomicznych robotów mobilnych nie zapewniają, niestety, dokładnego pozycjonowania pojazdu w krytycznych punktach, np. przy zatrzymywaniu w pobliżu miejsc składowania lub stanowisk obróbkowych w celu przekazania lub pobrania materiałów. W tych miejscach umieszcza się w związku z tym specjalne znaczniki (elektroniczne nadajniki impulsów), które ułatwiają pojazdowi określenie jego rzeczywistej pozycji i po porównaniu z zapamiętaną w pamięci komputera pozycją zadaną - dokonują odpowiedniej korekty położenia. Innym rozwiązaniem jest umieszczenie wzdłuż drogi w odpowiednich punktach znaków terenowych, utworzonych po obu stronach linii prowadzącej z bocznych kresek (odchodzących pod kątem prostym od głównej linii wyznaczającej tor ruchu). Pojazd czyta i interpretuje binarny kod 150 łych kresek (rys. 5.15).
Kierunek ruchu pojazdu
I Ścieżka ruchu_f~] fi f~l
$ ścieżka mchu i j Pojazd podejmuje decyzję
ok. 12 mm za ostatnim znacznikiem
4 znaczniki = kod
Kierunek ruchu o f g i 1 g 0 pojazdu
|-Ścieżka ruchu_[~J f~j 4
4 znaczniki = kod
Kierunek ruchu pojazdu
Kierunek ruchu pojazdu q ą q ,
trunek _
Znaczniki binarne na drodze robota: a) znacznik punktu zatrzymania, b) kod funkcji, c) kod
położenia
Miejsce .dokładnego zatrzymania się pojazdu jest zwykle długą metalową płytą na podłodze. Gdy zbliża się do punktu stopu, włącza się detektor metalu, zwalnia i po osiągnięciu końca płyty zatrzymuje się. Dokładność zatrzymania się wynosi od 0,75 mm do 0,25 mm.
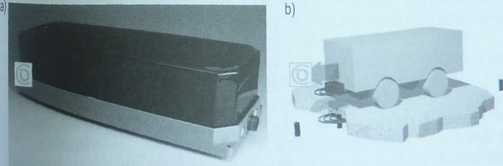
Najnowszy system lokalizacji i pozycjonowania robotów mobilnych to radiowy system RFID (ang. radio freąuency identification) z zastosowaniem trans-ponderów. frąnsponder nasłuchuje na określonej częstotliwości i odpowiada na jego własnej zróżnicowanej częstotliwości. Kiedy nadajnik zainstalowany na robocie (rys. 5.16) odbierze sygnał odpowiedzi z kodem transpondera, jest zdolny do określenia pozycji robota względem tego transpondera.
n iu__ _
Pozycjonowanie robota mobilnego z zastosowaniem transpondera: a) nadajnik, b) przesy nie sygnałów między nadajnikiem a transponderem
Wyszukiwarka
Podobne podstrony:
P1080246 5. Sterowanie robotów przemysłowych Ważną cechą architektury układów mikroprocesorowych jes
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
P1080249 5. Sterowanie robotów przemysłowych Proces depaletyzacji, bazujący na systemie wizyjnym (2
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
P1080241 5. Sterowanie robotów przemysłowych Rysunek S.4_____ Klasyfikacja układów sterowania robotó
55128 P1080239 5. Sterowanie robotów przemysłowych hiperbola, elipsa). Przeznaczona jest szczególnie
więcej podobnych podstron