PID1
-A-
Cyfrowy regulator ciągły PID
Algorytmy regulacji stosowane w regulatorach
Algorytm PID
Algorytm PID był praktycznie jedynym algorytmem regulacji w regulatorach analogowych i jest obecnie jeszcze nadal podstawowym algorytmem we wszystkich cyfrowych urządzeniach regulacyjnych.
W dziedzinie czasu algorytm ten można zapisać w następujący sposób:
y(0 = KP
yc
c(0 + Je(t)dt + Tr
a odpowiednia zależność operatorowa przedstawia się następująco:
1
Gr(s) = ^^ = Kp R Ae(s) P
1 +-+ sTd
sTC
Realizacja działania P, I oraz D
W rozdziale 3 przedstawiono czasowe i operatorowe funkcje regulatora PID. Dla regulatora P zależności te przedstawiają się w sposób następujący:
y(0 = + y0
GrM = ~ = Kp
Ae(s)
Dla regulatora PD
yo
y(t) = Kp| e(t) + Tr ~^“j +
Gr (s) = = Kp[l + sTr ]
Dla regulatora PI
y(t) = K,
c(0 + rr/e(t)dt
1
sTC
°R(S) = ^-Kp
Ae(s)
Z powyższych zależności widać, że w regulatorach P oraz PD występuje stały sygnał podporowy y0. Potrzeba istnienia tego sygnału wynika z następującego rozumowania. Przy jego braku i przy sygnale uchybu regulacji równym zeru sygnał wyjściowy regulatora byłby także równy zeru. A przecież sygnał wyjściowy powinien się zmieniać także przy ujemnych wartościach uchybu regulacji. Stąd przy zerowej wartości uchybu regulacji powinna istnieć niezerowa wartość sygnału wyjściowego regulatora określana właśnie stałym sygnałem podporowym y0. Przykładowe charakterystyki statyczne regulatorów P oraz PD przedstawione są na rys. 4.1. Mają one wspólny punkt przecięcia dla e=0. Wartość stałego sygnału podporowego y0 jest odpowiednio dobierana dla konkretnego układu regulacji. Za pomocą tej wartości następuje dopasowanie do punktu pracy i zakresu pracy urządzenia pomiarowego i urządzenia wykonawczego. _
y - sygnał wyjściowy regulatora, e - uchyb regulacji, t - czas,
Kp- wzmocnienie regulatora,
Tc - czas całkowania (zdwojenia) regulatora,
TR - czas różniczkowania (wyprzedzenia) regulatora, yc - warunek początkowy całkowania,
Gr(s) - transmitancja regulatora, s - operator Laplace’a.
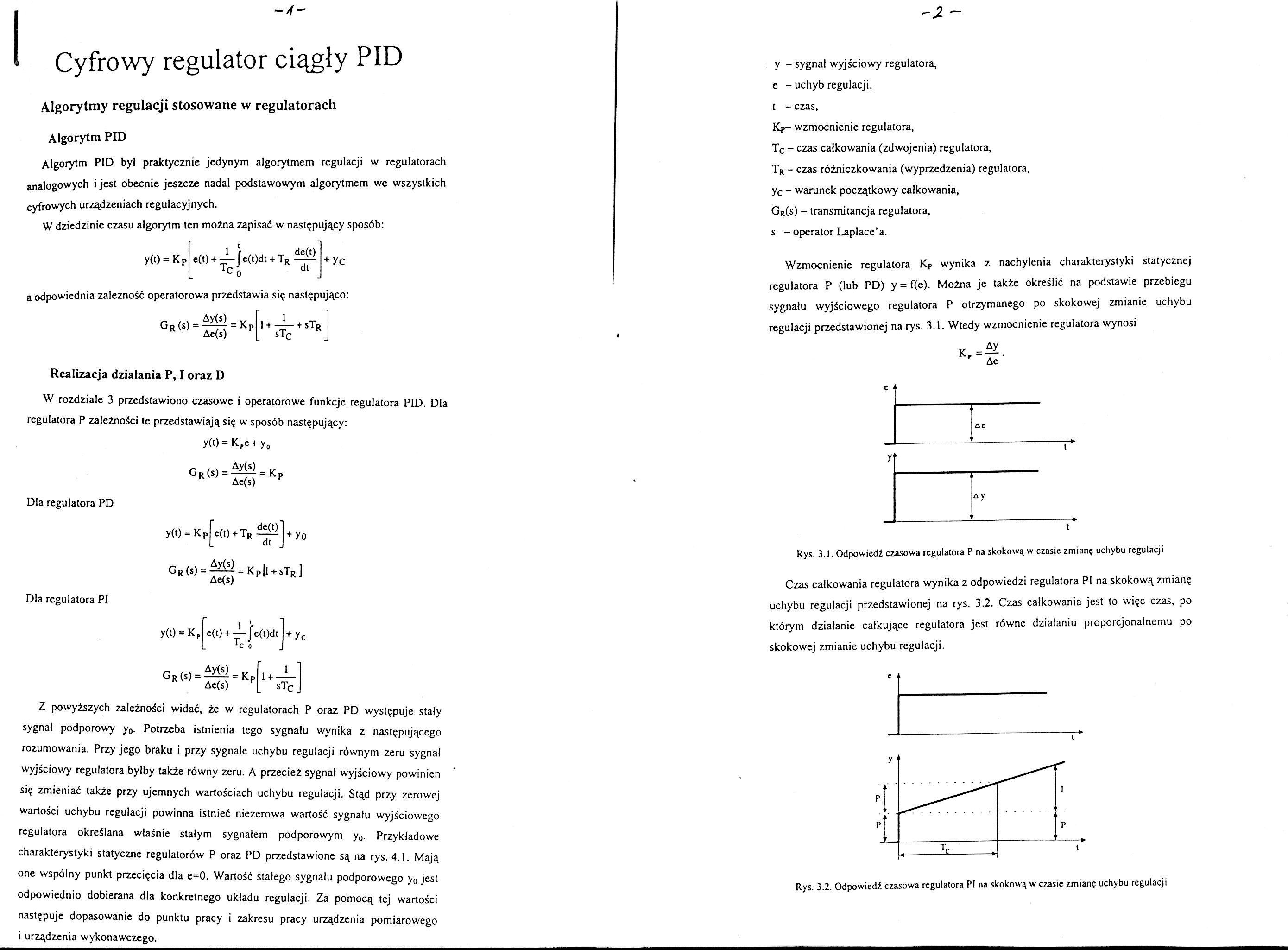
Wzmocnienie regulatora KP wynika z nachylenia charakterystyki statycznej regulatora P (lub PD) y = f(e). Można je także określić na podstawie przebiegu sygnału wyjściowego regulatora P otrzymanego po skokowej zmianie uchybu regulacji przedstawionej na rys. 3.1. Wtedy wzmocnienie regulatora wynosi
|
e |
Kr =—. óe | |
|
AC | ||
|
> |
1 | |
|
Ay | ||
|
Rys. 3.1. Odpowiedź cz Czas całkowania regu uchybu regulacji przedst< którym działanie całkuje skokowej zmianie uchybu e |
t asowa regulatora P na skokową w czasie zmianę uchybu regulacji atora wynika z odpowiedzi regulatora PI na skokową zmianę iwionej na rys. 3.2. Czas całkowania jest to więc czas, po ice regulatora jest równe działaniu proporcjonalnemu po regulacji. | |
i
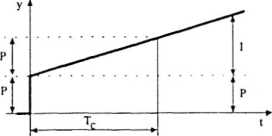
Rys. 3.2. Odpowiedź czasowa regulatora PI na skokową w czasie zmianę uchybu regulacji
Wyszukiwarka
Podobne podstrony:
SDC13006 sób cyfrowy regulacja położenia) a sterownikiem napędu posuwu (gdzie reguła cja prędkości
Strona 3 Do wykonania zadania wykorzystaj: Dane techniczne i schemat ideowy programowalnego cyfrowo
cyfrowa regulacja glosnosci metru można dodać szeregowo rezystor, co ograniczy zakres regulacji. Opt
Strona 4 Załącznik 1 Dane techniczne i schemat ideowy programowalnego cyfrowo regulatora napięcia
Strona 5 Załącznik 2 Dane katalogowe układów scalonych programowalnego cyfrowo regulatora napięcia
Strona 7 Załącznik 3 Wyniki pomiarów programowalnego cyfrowo regulatora napięcia stabilizowanego prz
47955 Strona 4 (8) Załącznik 1Dane techniczne i schemat ideowy programowalnego cyfrowo regulatora na
Strona 3 (11) Do wykonania zadania wykorzystaj: Dane techniczne i schemat ideowy programowalnego cyf
cyfrowy regulator głośności schemat wymagany jest dla drugiego kanału
Strona 3 (11) Do wykonania zadania wykorzystaj: Dane techniczne i schemat ideowy programowalnego cyf
więcej podobnych podstron