S6302473
Ogniwo początkowe łańcucha kinematycznego przenosi otrzymony ruch poprzez ogniwa łfcząee na ogniwo końcowa. Zolaźnoóć między ruchaa ogniwa początkowego jost uwarunkowana rodzajem ruchu, jaki aa wykonać ogniwo końcowa lub zaapól zwlęzany z tym ognlwaa. Stoaownla więc do tago narządza clę obrabiarkę przez np zazębiania odpowiedniej pory kół w skrzynce prędkości lub poeuwów, ewentualnie ze łożenie odpowiednich kół zębatych przekładni gitarowej ltp.
Funkcja kinematyczna (rys, lc)
Do rozwlęzań ogólnych aoźna przyjęć najproatazy schemat blokowy łańcucha klnemotycznego, na którya x oznacza wielkość wejściową. a y wielkość wyjieiop Wielkościami wajśclowyai i wyjściowymi mogę być: przemieszczenia liniowo (l) lub kętowe (<f) bądź prędkości liniowa (v) lub kętowo (o). Funkcja kinematyczna określa zależność wielkości wyjściowej y do wielkości wejściowej x łańcucha klnaaatycznego:
J ■ k (dla funkcji liniowej)
k - współczynnik proporcjonalności (przy założeniu, Za człony łańcucha kinematycznego nie odkształcaJę się pod dzlałanlea sił) •
Łańcuchy kinematyczna aoźna podzielić na:
a) liniowa typuz O-O oznacza łańcuch kinomatyczny, który przekazuje ruch obrotowy nie przekształcając go na lnnę postać ruchu. Zaś symbol 0 - P oznacza łań* cuch kinematyczny przekształcający ruch obrotowy na prostoliniowy;
b) nieliniowa (jeżeli zawiera co najmniej Jeden człon nieliniowy, np. mechanizm Jarzmowy, maltański, korbowy, przekładnia zębata z kołami zębatyal eliptycznymi) i
c) sumujęce (różnicowe).


Kinematyczne równania ruchu (rys. Id)
Podstawę rachunkowy konieczną dla narządzania łańcucha kinematycznego jest wzór analityczny do narzędzania (nie mylić z nastawieniem, gdyż nastawienie# będzie np. obrócenia obrotnicy o pawian kęt dla toczenia stożka ltp.). Wzór tan otrzymuje się przez rozwiązanie równania ruchu, przy czym niewiadomą ruchu może być albo przełożenie węzła (np. kół wymiennych gitarowych) do narzędzania lub wielkość ruchu ogniwa końcowego.
Dla ułożenia kinematycznego równania ruchu należy przyjąć odpowiednią jednostkę ruchu ogniwa początkowego (np. ^ lub 1 obr WR) oraz określić żądaną wielkość ruchu ogniwa końcowego.
Kinematyczna równania ruchu poszczególnych łańcuchów kinematycznych obrabiarki można układać na podstawia schematów kinematycznych. Znacznym ułatwienie# przy oporządzaniu równań dla obrabiarki posiadającej skomplikowany schemat kinematyczny o duZaJ liczbie łańcuchów Jest korzystania z tzw. zapisu strukturalnego schematu kinematycznego.
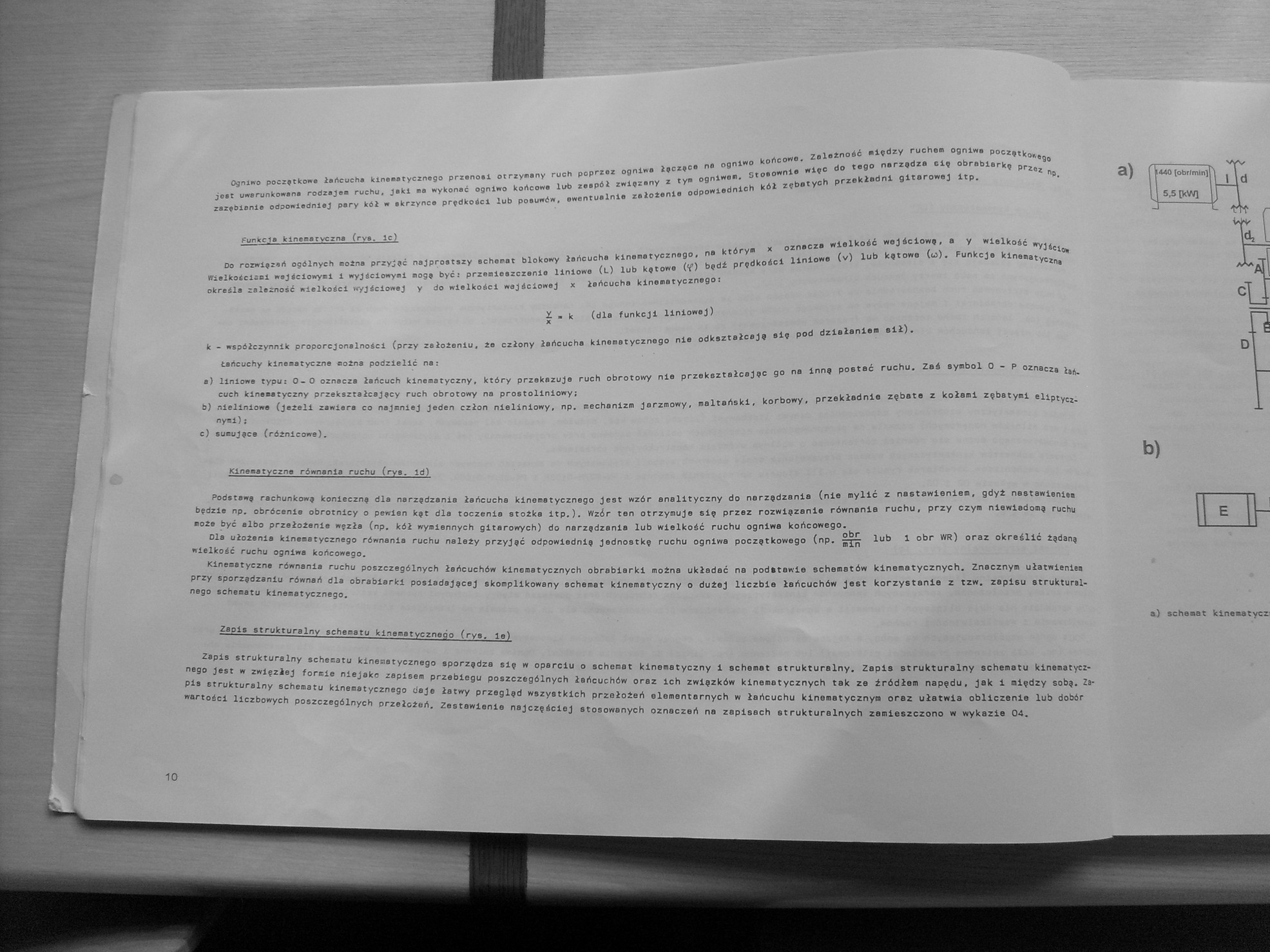
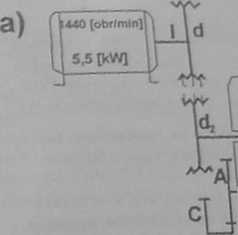
a) schemat kinaaatycz
Zapis strukturalny schematu kinematycznego (rys, la)
Zapis strukturalny schematu kinematycznego sporządza się w oparciu o schemat kinematyczny 1 schemat strukturalny. Zapis strukturalny schematu kinematycznego jest w zwięzłej formie niejako zapisem przebiegu poszczególnych łańcuchów oraz ich związków kinematycznych tak za źródłem napędu, jak 1 między sobą. Za* pis strukturalny schematu kinematycznego daje łatwy przegląd wszystkich przełożeń alamantarnych w łańcuchu kinematycznym oraz ułatwia obliczania lub dobór wartości liczbowych poszczególnych przełożeń. Zastawiania najczęściej stosowanych oznaczeń na zapisach strukturalnych zamieszczono w wykazie 04.
Wyszukiwarka
Podobne podstrony:
Obliczanie wyników: Wartość oporu na ścinanie otrzymuje się poprzez pomnożenie odczynu na tarczy prz
anatomia0046 ZAMKNIĘTE ŁAŃCUCHY KINEMATYCZNE Ogniwo końcowe nie jest swobodne (jest ustalone) Ruch j
SNC00156 OTWARTY ŁAŃCUCH KINEMATYCZNY Końcowe ogniwo (kosc) jest swobodne łączy się tylko z jednym o
anatomia0045 OTWARTY ŁAŃCUCH KINEMATYCZNY Końcowe ogniwo (koić) jest swobodne i łączy się tylko z je
Zdjęcie012 Tradycyjne zespoły wrzecionowe znapędem pośrednim Wrzeciono otrzymuje ruch obrotowy od si
IMGc44 (3) Zalety przekładni łańcuchowych: - możność przenoszenia dużej siły obwod
SNC00161 Klatka piersiowaRuchy oddechowe -Zamknięty łańcuch kinematycznyZaangażowanie dodatkowych mi
Mechanika)8 4. Elementy kinematyki 4.1. Kinematyka punktu. Ruch obrotowy bryły. Kinematyka - nauka b
ruch okresie letnim (w czerwcu i na początku lipca) oraz w październiku. W okresach tych nastąpiło w
Procesy typu fizyko - mechanicznego obejmują m in. takie operacje jak kinematyczna obróbka substancj
więcej podobnych podstron