17448 str058 (3)
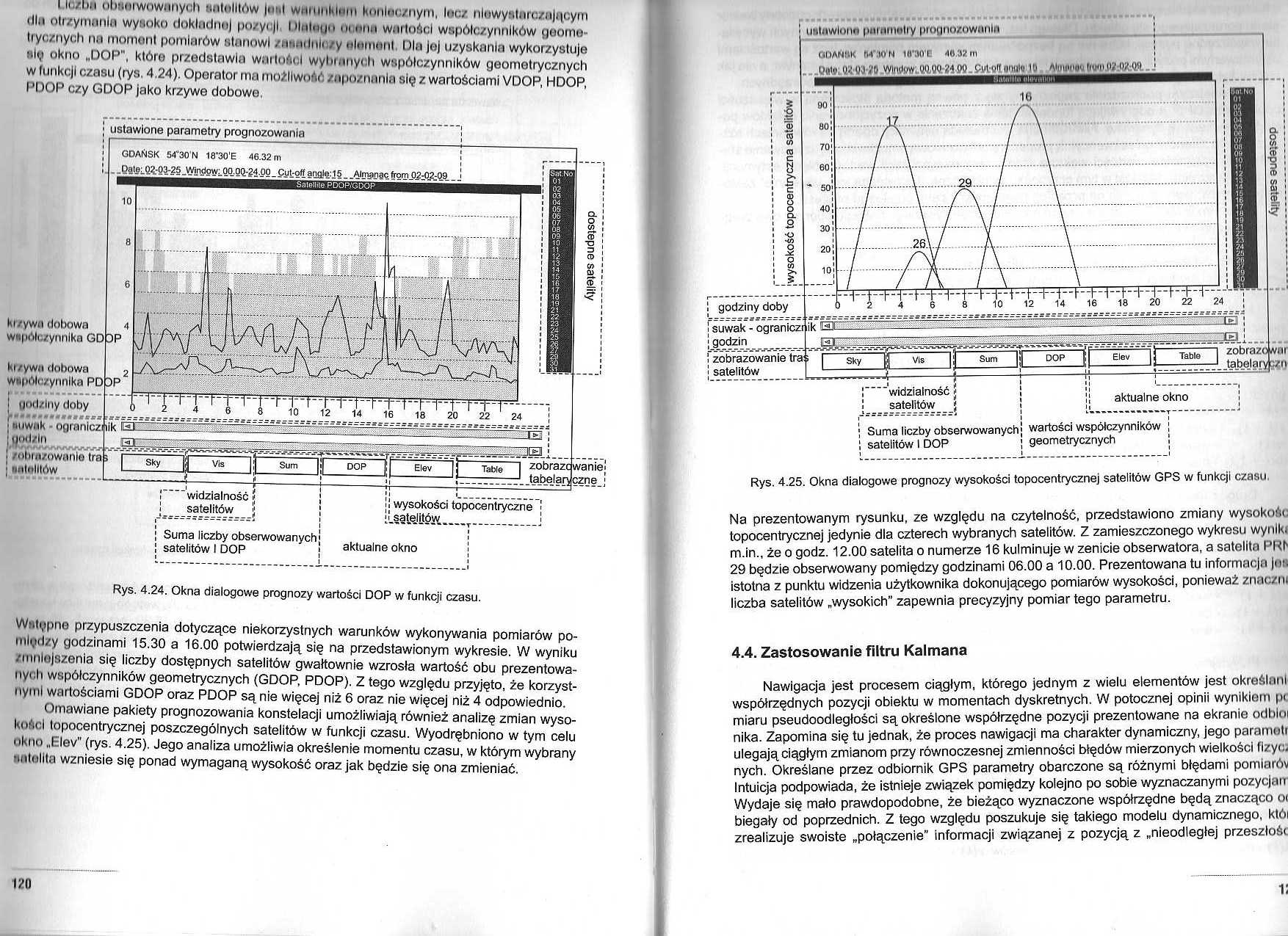
i iczbH obserwowanych tinlolllów |nui wumiildnm Imnlnc/nym, tucz niewystarczającym illu otrzymania wysoko dokładno) pozycji l»l«lmjn o< min wartości współczynników geometrycznych na momant pomiarów stanowi zaśmiali zy tilnmnnl Dla Jej uzyskania wykorzystuje się okno „DOP”, któro przedstawia wartości wybornych współczynników geometrycznych w funkcji czasu (rys. 4.24). Operator ma moźllwośf zapoznania się z wartościami VDOP, HDOP, PDOP czy GDOP jako krzywe dobowe,
ki/ywn dobowa współczynnika GD
kr/ywn dobowa wwpólozynnlka PD
ustawione parametry prognozowania
GDAŃSK S4"30 N 18‘30'E 46.32 m
. -Q0l§LQ?:Q3'25_Window^00.06-24.00_ CuCoff anglę:15 _ .Ąlmąnąę fromj)2d0_2-09 .
DP
|
Satellite PDOP/GDOP | |||
|
p W |
...................MA_____ | ||
|
ffl: | S ii Hig .. ...... ...... ......... ........ ...__... | |||
|
t | |||
dostępne satelity
godziny doby
uiiwiik ogranicznik IS1 gadzin
/obluzowanie Irak milolltńw
1 zobrazdwaniej J__tabeląry czn§;
"widzialnośćij satelitów i
II wysokości topocentryczne | [(.sątelUów_______________j
; Suma liczby obserwowanych; I satelitów I DOP
aktualne okno
Rys. 4.24. Okna dialogowe prognozy wartości DOP w funkcji czasu.
Wslypne przypuszczenia dotyczące niekorzystnych warunków wykonywania pomiarów pomiędzy godzinami 15.30 a 16.00 potwierdzają się na przedstawionym wykresie. W wyniku zmniejszenia się liczby dostępnych satelitów gwałtownie wzrosła wartość obu prezentowanych współczynników geometrycznych (GDOP, PDOP). Z tego względu przyjęto, że korzystnymi wartościami GDOP oraz PDOP są nie więcej niż 6 oraz nie więcej niż 4 odpowiednio.
Omawiane pakiety prognozowania konstelacji umożliwiają również analizę zmian wysokości topocentrycznej poszczególnych satelitów w funkcji czasu. Wyodrębniono w tym celu i>kno „Elev” (rys. 4.25). Jego analiza umożliwia określenie momentu czasu, w którym wybrany satelita wzniesie się ponad wymaganą wysokość oraz jak będzie się ona zmieniać.
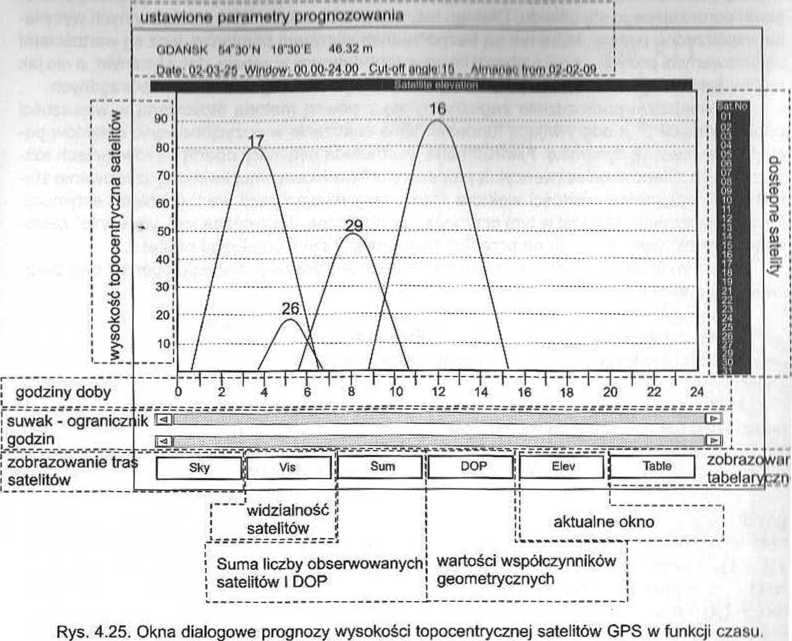
Na prezentowanym rysunku, ze względu na czytelność, przedstawiono zmiany wysokość topocentrycznej jedynie dla czterech wybranych satelitów. Z zamieszczonego wykresu wynik, m.in., że o godz. 12.00 satelita o numerze 16 kulminuje w zenicie obserwatora, a satelita PUt 29 będzie obserwowany pomiędzy godzinami 06.00 a 10.00. Prezentowana tu informacja jon istotna z punktu widzenia użytkownika dokonującego pomiarów wysokości, ponieważ znac/nt liczba satelitów „wysokich” zapewnia precyzyjny pomiar tego parametru.
4.4. Zastosowanie filtru Kalmana
Nawigacja jest procesem ciągłym, którego jednym z wielu elementów jest określani współrzędnych pozycji obiektu w momentach dyskretnych. W potocznej opinii wynikiem p< miaru pseudoodległości są określone współrzędne pozycji prezentowane na ekranie odbloi nika. Zapomina się tu jednak, że proces nawigacji ma charakter dynamiczny, jego parametr ulegają ciągłym zmianom przy równoczesnej zmienności błędów mierzonych wielkości fizyc. nych. Określane przez odbiornik GPS parametry obarczone są różnymi błędami pomiaróv Intuicja podpowiada, że istnieje związek pomiędzy kolejno po sobie wyznaczanymi pozycjan Wydaje się mało prawdopodobne, że bieżąco wyznaczone współrzędne będą znacząco o< biegały od poprzednich. Z tego względu poszukuje się takiego modelu dynamicznego, któi zrealizuje swoiste „połączenie" informacji związanej z pozycją z „nieodległej przeszłość
i:
Wyszukiwarka
Podobne podstrony:
Zadania 1 "rzykład 1. Poddano obserwacji 11 rodzin ze względu na liczbę dzieci w rodzinie i otr
skanuj0011 (280) Wszyscy autorzy podkreślają tępotę tych osobników. Naocznym obserwatorom trudno był
skanuj0015 (156) • Zebranie wiadomości na temat obserwowanych zjawisk przyrodniczy
skanuj001 12 Daniela BecelewskaCzym jest wsparcie emocjonalne ? Na podstawie określeń teoretycznych
skanuj0022 12MISTRZYNI OBSERWUJE ŚWIAT,LECZ UFA SWOJEJ WEWNĘTRZNEJ WIZJI. Mistrzyni obserwuje barwy
skanuj0022 (99) Płynem stosowanym przy obserwacji izolowanego serca żaby jest płyn Ringera, który za
skanuj0057 (21) •L: 11S Nomenklatura ■Urn ■iin n Lj 0 i normy zachowań; 3) czy obserwuje się podobne
Etykieta przy posi?ku 54 Pray MoleKlykieln pr/y posiłku GJy ci powie kłoś snnu sucfrt, (o odpowiedz
więcej podobnych podstron