28037 Image9 (18)
■ Projekty AVT
tse
nieistotne
|
Charakterystyka przełączania |
Minimalny czas |
|
tIIN - czas włączenia dla wyjść |
50p> |
|
t.HT - czas wyłączenia dla wyjść |
150us |
|
t^ - czas selekcji wyjścia |
50j*s |
>T
tCN
Wolne końce cewek łączy się ze sobą i tworzą one kolumnę, podobnie z wierszami, przy czym wiersz SET zbudowany jest z połączenia anod diod, a wejście RESET z połączenia katod
W tym momencie przyszła pora na przedstawienie nieznanego Czytelnikom EdW układu scalonego FP2800A i jego danych technicznych.
Dekoder FP2800A
FP28UOA umożliwia selekcję jednego z 28 wyjść prądowych. Wejścia danych wykonano w technologii CMOS. co umożliwia sterowanie bezpośrednio z uP. Są pogrupowane w taki sposób, że umożliwiają zaadresowanie jednego segmentu spośród czterech wyświetlaczy.
Układ wyprowadzeń FP2800A przedstawia rysunek 3. Zamknięty jest on w obudowie typu D1L40. Wspominam o segmentach, ponieważ układ jest „dedykowany” do sterowania wyświetlaczami 7-segmcntowymi. ale to nie stoi nu przeszkodzie, by go użyć w roli sterownika matrycy XY pikseli magnetycznych, a dokładniej - jedynie kolumn. Do sterowania wierszami również można go zastosować, jednak ze względu na uzyskanie dobrej widoczności dla tekstu dwuwierszowego minimalna liczba wierszy powinna wynosić 16. Nasz driver posiada za mało wyjść, aby się w tym celu nadaw ul. Można by było w tym drugim przypadku zrezygnować z dwóch diod dołączonych do każdej z cewek, ale to by wymagało przeproiektowama płytki wewnątrz tablicy.
|
1 |
COM 2D |
40 |
|
1F 2C 1C 2B IB 2A 1A V S GND 2E 1E 2G IG 3G OG 3E OE 3F |
38 | |
|
37 -*fT | ||
|
34 | ||
|
"35“ | ||
|
mni “77" |
"55“ 31 “29 | |
|
13 |
OD 3C OC 3B OB 3A OA GND |
~W~ |
|
U Ę: |
27 | |
|
26 "25“ 24 | ||
|
18 ~tr -ęt |
Al D |
23 "37" |
|
21 | ||
FP2BOOA
Ryt. 3 Opi* wyprowadzek FP2800A
Funkcje poszczególnych wyprowadzeń układu
Pin D (data, 23 nóżka) ustawia funkcje wyjść na źródło lub wejście prądowe. Aktywowanie jego odbywa się w czasie gdy na wejściu E (enable, 24) występuje stan wysoki (+5V). W celu wyeliminowania skutku zbyt długiego załączenia wyjścia, sterowanie b odbywa się poprzez obwód RC (rysunek 4). Stała czasowa dobrana została na około 20ms. Czas ten jest na tyle krótki, że nie spowoduje uszkodzenia mechanicznego cewki, jej przepalenia. Poza tym dekoder FP2800A został wyposażony dodatkowo w diody zabezpieczające przed przepięciami. Wybór aktywnego wyjścia dokonuje się za pomocą AO. A1. A2, BO. R1 (odpowiednio 18 do 22 nóżki) Wejścia A0-A2 decydują, który z segmentów' ma zostać ustawiony (SET). Natomiast wejścia BO i BI służą do wyboru jednej spośród 4 cyfr. Wszystkie kombinacje, a także rolę wejść D i E przedstawia tabela 1. umieszczona na stronie internetowej EdW.
zuP || C do 23 nóżki FP2800
Rys. 4 Obwód RC zabezpieczający wyświetlacz
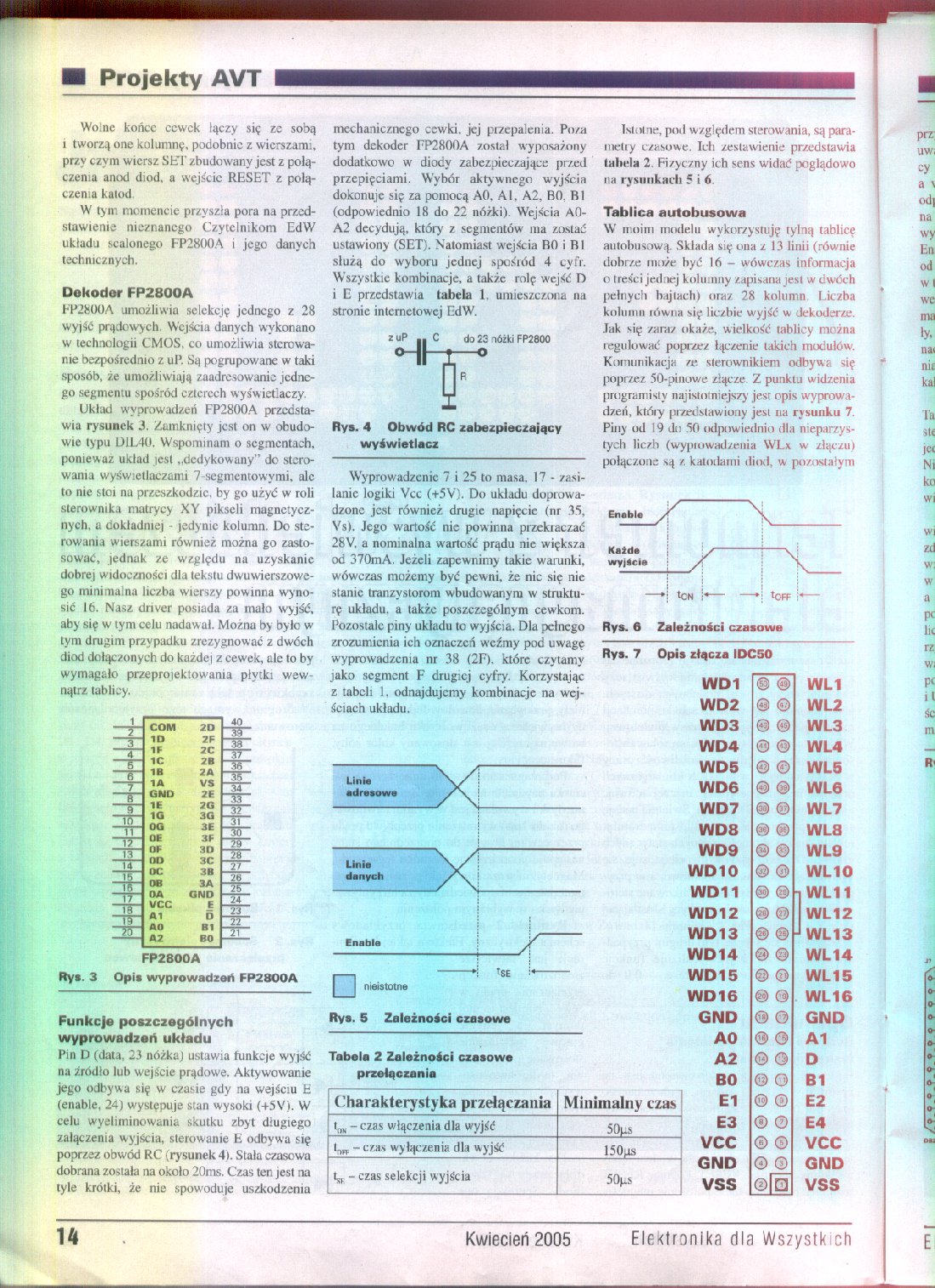
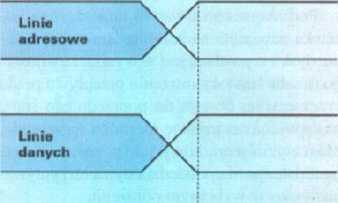
Wyprowadzenie 7 i 25 to masa. 17 - zasilanie logiki Vcc (+5V). Do układu doprowadzone jest również drugie napięcie (nr 35, Vs). Jego wartość nic powinna przekiaczać 28V. a nominalna wartość prądu nic większa od 370mA. Jeżeli zapewnimy takie warunki, wówczas możemy być pewni, że nic się nic stanic tranzystorom wbudowanym w strukturę układu, a także poszczególnym cewkom. Pozostałe piny układu to wyjścia. Dla pełnego zrozumienia ich oznaczeń weźmy pod uwagę wyprowadzenia nr 38 (2F). które czytamy jako segment F drugiej cyfry. Korzystając z tabeli 1. odnajdujemy kombinacje na wejściach układu.
Enable
□
Rys. 5 Zależności czasowe
Tabela 2 Zależności czasowe przełączania
Istotne, pod względem sterowania, są parametry czasowe. Ich zestawienie przedstawia tabela 2. Fizyczny ich sens widać poglądowo na rysunkach 5 i 6
Tablica autobusowa
W moim modelu wykorzystuję tylną tablice autobusową. Składa się ona z 13 linii (równie dobrze może być lń - wówczas informacja o treści jednej kolumny zapisana jest w dwóch j>ehiych bajtach) oraz 28 kolumn Liczba kolumn równa się liczbie wyjść w dekoderze. Jak się zaraz okaże, wielkość tablicy można regulować poprzez łączenie takich modułów. Komunikacja ze sterownikiem odbywa się poprzez 50-pinuwe złącze Z punktu widzenia programisty najistotniejszy jest opis wyprowadzeń, któiy przedstawiony jest na rysunku 7. Piny od 19 ilu 50 odpowiednio dla nieparzystych liczb (wyprowadzenia WLx w złączu) połączone są /. katodami diod, w pozostałym
Enoble
Każde
wyjecie
tOFF
Rys. 6 Zależności czasowe Rys. 7 Opis złącza IDC50
WD1
WD2
WD3
WD4
WD5
WD6
WD7
WD8
WD9
WD10
WD11
WD12
WD13
WD14
WD15
WD16
GND
AO
A2
BO
El
E3
VCC
GND
VSS
WL1
WL2
WL3
WL4
WL5
WL6
WL7
WL8
WL9
WLIO
WL11
WL12
WL13
WL14
WL15
WL16
GND
A1
D
BI
E2
E4
VCC
GND
VSS
© © © © © © © © © © © © © © © © © © © © © © © © 0 0 0 @ © © © 0 © O © © © o © o © ® ® © © © © ©
® □
14 Kwiecień 2005 Elektronika dla Wszystkich
Wyszukiwarka
Podobne podstrony:
73502 Image8 (18) Projekty AVT mmmmmm DIGITOL AUDIO GENERATOR Opisywany generator jest przeznaczony
27282 Image9 (17) Projekty AVT Rys. 2 zwiększana o pewien przyrost, proporcjonalny do częstotliwości
Image9 (22) Projekty AVT napięciu nie jest ładowana. Podczas braku zasilania dioda D2 zasila zegar,
Image9 (16) ■ Projekty AVT b) Rys. 3 Schemat podstawowy ładowarki do akumulatora 12V. a) +vcc .u*
Image9 (23) ■ Projekty AVT regulowana od +6 do -64dB z krokiem co 2dD. Dodatkowy krok pozwala osiągn
więcej podobnych podstron