42791 Untitled Scanned 35
- 70 -
lić główne cechy tego układu. Cechami decydującymi o wyborze struktury układu i wyborze metody projektowania są i j - ustalony bądź nieustalony przebieg kolejności zmian sygnałów oddziałujących na obiekt sterowania,
- charakter zależności pomiędzy kolejnymi stanami tych sygnałów.
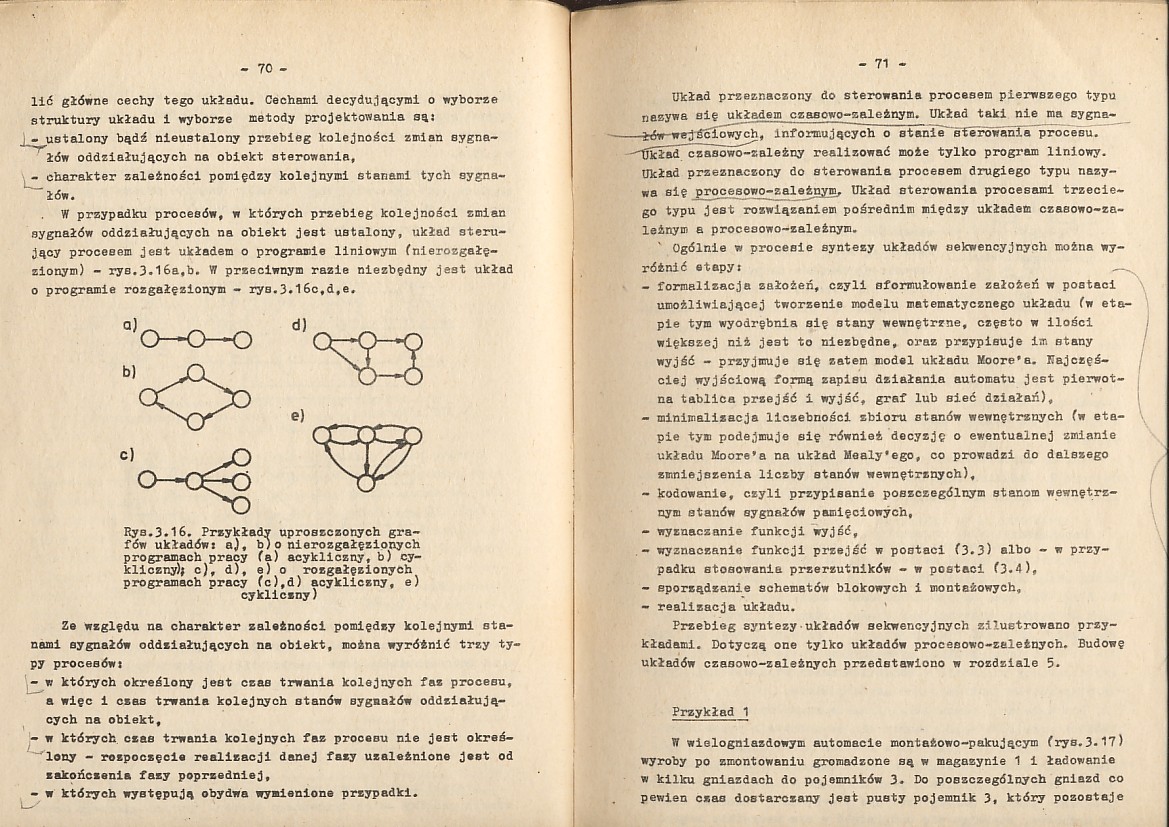
W przypadku procesów, w których przebieg kolejności zmian sygnałów oddziałujących na obiekt jest ustalony, układ sterujący procesem jest układem o programie liniowym (nierozgałę-zionym) - rya.3.l6a,b. W przeciwnym razie niezbędny jest układ o programie rozgałęzionym - rys.3»l6c,d,e.
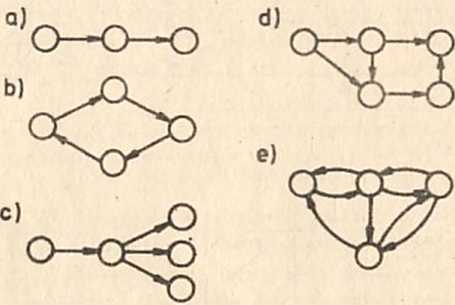
Rys.3.16. Przykłady uproszczonych grafów układów: aj, b)o nierozgałęzionych programach pracy (a) acykliczny, b) cykliczny)* c), d), e) o rozgałęzionych programach pracy (c),d) acykliczny, e) cykliczny)
Ze względu na charakter zależności pomiędzy kolejnymi stanami sygnałów oddziałujących na obiekt, można wyróżnić trzy typy procesów:
- w których określony jest czas trwania kolejnych faz procesu, a więc i czas trwania kolejnych stanów Bygnałów oddziałujących na obiekt,
- w których czas trwania kolejnych faz procesu nie jest określony - rozpoczęcie realizacji danej fazy uzależnione jeBt od zakończenia fazy poprzedniej,
- w których występują obydwa wymienione przypadki.
Układ przeznaczony do sterowania procesem pierwszego typu nazywa się układem czasowo-zależnym. Układ taki nie ma aygna-—łów~wejściowych, informujących o stanie sterowania procesu.
"Układ czasowo-zależny realizować może tylko program liniowy. Układ przeznaczony do sterowania procesem drugiego typu nazywa się jgrocfesowo-zależnym. Układ sterowania procesami trzeciego typu jest rozwiązaniem pośrednim między układem czasowo-za-leżnym a procesowo-zależnym.
Ogólnie w procesie syntezy układów sekwencyjnych można wyróżnić etapy:
- formalizacja założeń, czyli sformułowanie założeń w postaci umożliwiającej tworzenie modelu matematycznego układu (w etapie tym wyodrębnia się stany wewnętrzne, często w ilości większej niż jest to niezbędne, oraz przypisuje im stany wyjść - przyjmuje się zatem model układu Moore*a. Najczęściej wyjściową formą zapisu działania automatu jest pierwotna tablica przejść i wyjść, graf lub sieć działań),
- minimalizacja liczebności zbioru stanów wewnętrznych (w etapie tym podejmuje się również decyzję o ewentualnej zmianie układu Moore*a na układ Mealy*ego, co prowadzi do dalszego zmniejszenia liczby stanów wewnętrznych),
- kodowanie, czyli przypisanie poszczególnym stanom wewnętrznym stanów sygnałów pamięciowych,
- wyznaczanie funkcji wyjść,
- wyznaczanie funkcji przejść w postaci (3.3) albo - w przypadku stosowania przerzutników - w postaci (3.4),
- sporządzanie schematów blokowych i montażowych,
- realizacja układu.
Przebieg syntezy układów sekwencyjnych zilustrowano przykładami. Dotyczą one tylko układów procesowo-zeleżnych. Budowę układów czasowo-zależnych przedstawiono w rozdziale 5.
Przykład 1
W wielogniazdowym automacie montażowo-pakującym (rys.3.17) wyroby po zmontowaniu gromadzone są w magazynie 1 i ładowanie w kilku gniazdach do pojemników 3. Do poszczególnych gniazd co pewien czas dostarczany jest pusty pojemnik 3, który pozostaje
Wyszukiwarka
Podobne podstrony:
12789 Untitled Scanned 35 170 ŚREDNIOWIECZNA PIESN RELIGIJNA POLSKA Anjeli Bogu dziękują, A wszytcy
Untitled Scanned 35 2 M3łttSęON*31S.
Untitled Scanned 35 99 wolna. Jednakże ani z ani żadna inna zmienna nic jest w niej wolna. Formuła t
Untitled Scanned 35 O fmoj &.l-5r Umme dbaą^ coltow-yi kiom a) CĄ2ar (aflntól N*P fkf/
12789 Untitled Scanned 35 170 ŚREDNIOWIECZNA PIESN RELIGIJNA POLSKA Anjeli Bogu dziękują, A wszytcy
Untitled Scanned 35 stąd po przekształceniu i podstawieniu otrzymamy: E 6 0 v2 =1-
Untitled Scanned 35 170 ŚREDNIOWIECZNA PIESN RELIGIJNA POLSKA Anjeli Bogu dziękują, A wszytcy wielbi
85851 Untitled Scanned 35 (4) Ćwiczenie umiejętności ortograficznych Wyrazy z „h" i „ch" D
więcej podobnych podstron