77143 skanuj0014
• dla drugiej przekładni podstawowej równa jest licz-k, bie przełożeń elementarnych pierwszej przekładni pod-
stawowej, czyli x2 — Pi, a iloraz tpv2 =
• dla trzeciej przekładni podstawowej x3 jest równe ilo-m czynowi Pip2, a <pp3 —
• dla czwartej przekładni podstawowej xi = p1p2p3] a | <Ppi = ip2p3 itd.
Na rysunku. 8.13 podano przykładowo wykresy Strukturalne jednej z trzech możliwych struktur regularnych Kyunastostopniowej skrzynki prędkości k — 3-2-2 = (1, <p, <P2) (1, ę?3) (1, ę?6) oraz jednej z pięciu możliwych struktur -pochodnych (1, <pB) (1, 9?, ę?2) (1, 9?®).
Najczęściej stosowane podstawowe struktury są następujące:
k 6; (1, 97, 9j2) (1, 9?3)
k = 8; (1» 9?) <1» ę?2) (1» ę?4) lub (1, <p, 9?3) (1, 9?4)
r~' 9» (J» 9^) (*» ^ p6)
k = 12; (1, <p, (fF) m qfl) (1, p®)
k 1=: 16; (1, <p, (p2,9?3) (i; 9?4) (1, p®)
k = 18; (1, 9?, 9J2) (1, 9J3, 9?®) (1, 9?®). .
8.5. Regularne układy strukturalne z silnikami wielobiegowymi
Zastosowanie silników wielobiegowych w skrzynkach prędkości upraszcza ich konstrukcję oraz daje możliwość zmiany prędkości bez zatrzymywania obrabiarki.
Najczęściej stosuje się silniki dwubiegowe o prędkościach obrotowych pozostających do siebie w stosunku 1:2 lub 1:4 oraz silniki trzybiegowe o stosunku prędkości 1:2:4. Wtedy prędkości obrotowe wynoszą zwykle dla silników dwubiegowych 1400/710 (9?$ = 2), 2800/710 (9?s = 4), a dla silników trzybiegowych 2800/1400/710 (<ps = 2).
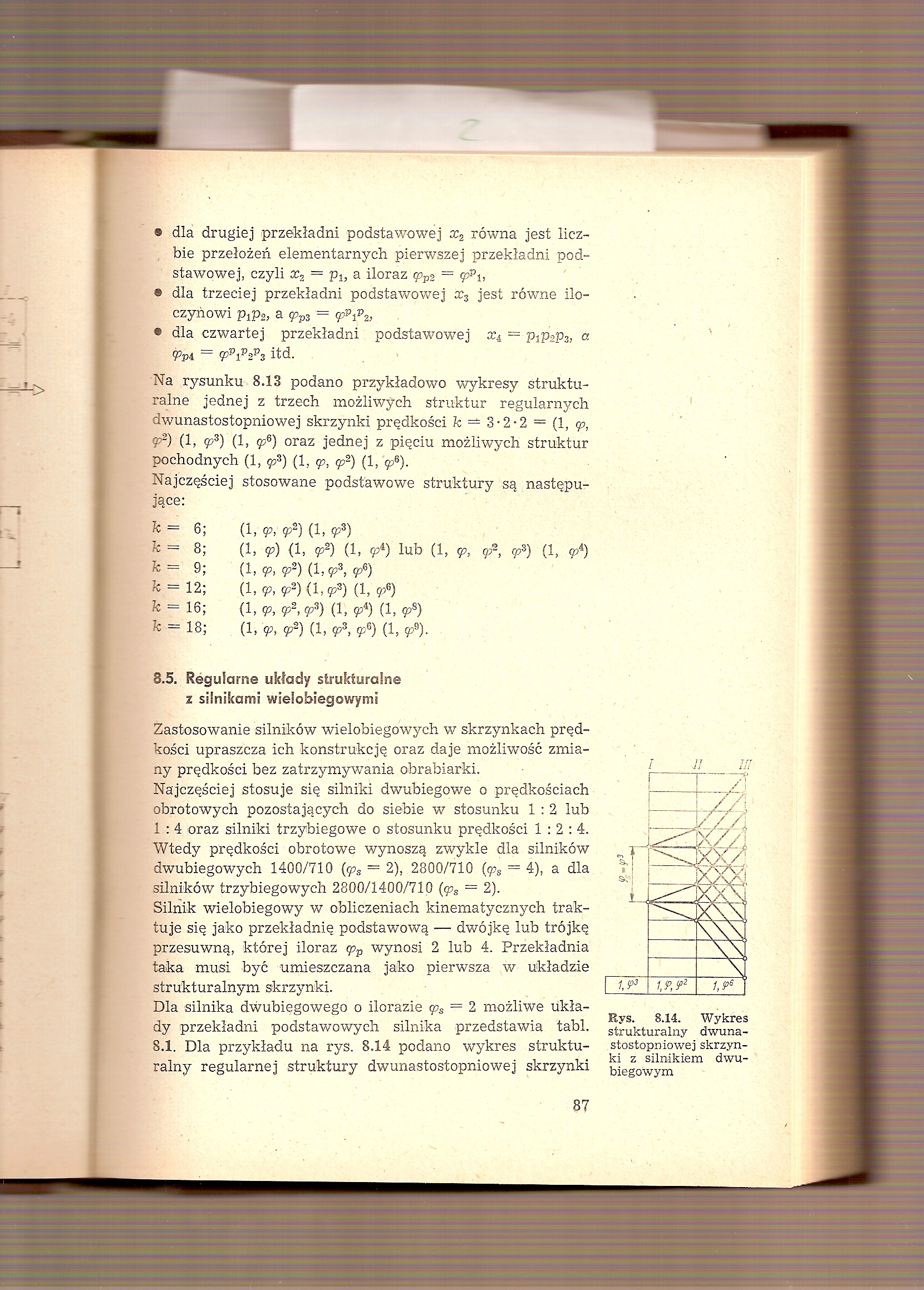
Silnik wielobiegowy w obliczeniach kinematycznych traktuje się jako przekładnię podstawową — dwójkę lub trójkę przesuwną, której iloraz cpp wynosi 2 lub 4. Przekładnia taka musi być umieszczana jako pierwsza ,w układzie strukturalnym skrzynki.
Dla silnika dwubięgowego o ilorazie <p8 = 2 możliwe Układy przekładni podstawowych silnika przedstawia tabl. 8.1. Dla przykładu na rys. 8.14 podano wykres strukturalny regularnej struktury dwunastostopniowej skrzynki
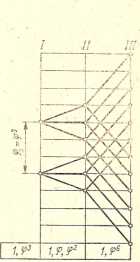
Rys. 8.14. Wykres strukturalny dwuna-stostopniowej skrzynki z silnikiem dwu-biegbwym
Wyszukiwarka
Podobne podstrony:
skanuj0014 • dla drugiej przekładni podstawowej równa jest licz-k, bie przełożeń e
skanuj0021 (152) 3* - a/ Ocena de podstawie rodowodu jest to najprostsza metoda oceny wartości hodow
skanuj0011 2 Zadanie 19. (5 pkt) Podstawą ostrosłupa jest prostokąt ABCD, a krawędź SA jest prostopa
10?ch milosci 5 Miłość chce tego, co dobre dla drugiej osoby. Własna osoba jest na dr
38827 skanuj0020 (5) niż przeciwnik. Liczba punktów równa jest liczbie wszystkich kul zespołu znajdu
więcej podobnych podstron