IMAG2593
Oirofciingutocu / obwnraqm GPS i MS
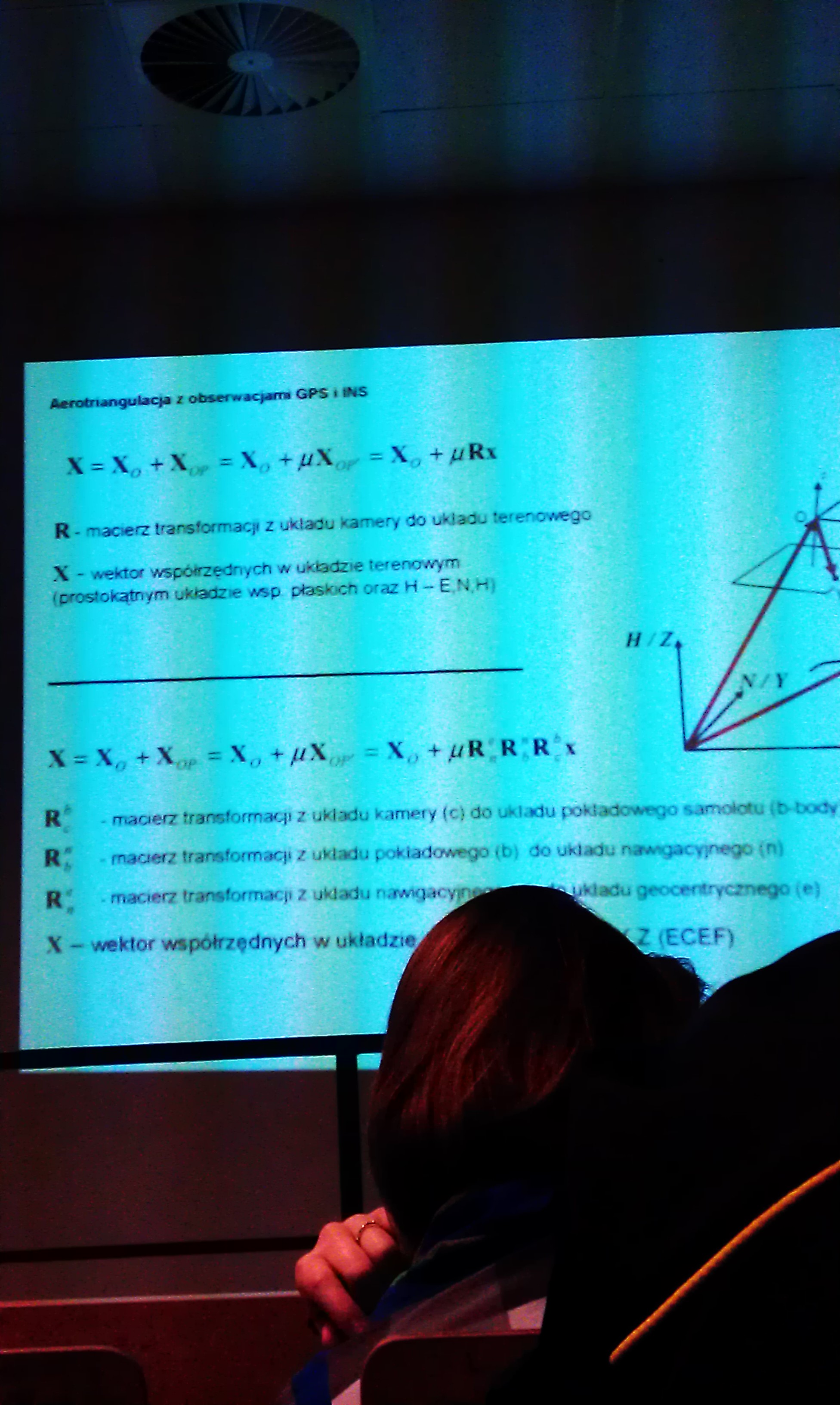
X = X„ + X
//X ... = \j + //R\
R f maaerz transformacji z układu kamer/ do układu terenowego
X - wektor Wspołrzędn yęh w uki3dzie terenowym ' prostokątnym układzie vvsp płask on oraz H - EM H>
V )
X = x,„+x,v = \,;+//X; . s X., 4-//R R R
R macierz transformacji z układu kamery (C) do uk Jadu pok ladoweco samotc
•I macierz transformacji z układu pokładowego (b) do układu nawigacyjnego
R' macierz (r imtormacji z układu nawigae yioj
X - wektor współrzędnych w układzie.
Wyszukiwarka
Podobne podstrony:
Wyższa 1 TRANSFORMACJA Z UKŁADU HORYZONTALNEGO (H) DO UKŁADU RÓWNIKOWEGO GODZINNEGO (HA) * &nb
Wy?sza 4 ZŁOŻENIE TRANSFORMACJI Transformacja układu horyzontalnego do równikowego ekwinokcjalnego m
IMAG2592 tangUacia z obsanmcjami GPS i IMS Pokładowe p om tary kątów orientujących są odnoszone do u
IMAG2592 tangUacia z obsanmcjami GPS i IMS Pokładowe p om tary kątów orientujących są odnoszone do u
IMAG2592 tangUacia z obsanmcjami GPS i IMS Pokładowe p om tary kątów orientujących są odnoszone do u
IMAG2592 tangUacia z obsanmcjami GPS i IMS Pokładowe p om tary kątów orientujących są odnoszone do u
slajd02 (25) PRZEKROJE Przekroje wielościanów -metoda transformacji układu odniesienia
slajd64 (36) PRZREKROJE Przekrój powierzchni stożka Metoda transformacji układu odniesienia
slajd02 (25) PRZEKROJE Przekroje wielościanów -metoda transformacji układu odniesienia
więcej podobnych podstron