Image132
Projekty AVT ■
Projekty AVT ■
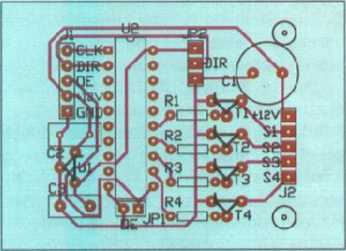
Rys. 2 Schemat montażowy
wszystkie przerzutnilci są wyzerowane. Deklaracja stanu początkowego licznika jest konieczna dla poprawnego działania układu. Po skompilowaniu projektu (z minimalizacją ustawioną na Quick) powstaje plik z rozszerzeniem , jed”, który należy wgrać do układu za pomocą specjalnego programatora. Ja używam w tym celu mocno zmodyfikowanego programatora GALBLAST autorstwa Manfreda Winterhoffa. Jego schematy dostępne są w Internecie.
Działanie zaprogramowanego układu jest bardzo proste. Impulsy na wejściu clk powodują przyjmowanie przez licznik kolejnych zadanych stanów. Jeśli wejście dir jest w stanie wysokim, licznik „zlicza w górę", w przeciwnym razie „w dół”. Najpierw załączana jest pierwsza cewka, następnie pierwsza i druga, potem tylko druga itd. Wyjścia 12-15 U2 sterują tranzystorami T1-T4, które z kolei włączają odpowiednie cewki.
Całość zasilana jest napięciem stałym 12V. Stabilizator Ul zapewnia napięcie 5V dla układu GAL. Kondensatory Cl-C3 tłumią zakłócenia generowane przez silnik i zapobiegają wzbudza ni u się stabilizatora. Rezystory Rl-R4 ograniczają prąd bazy tranzystorów.
Montaż i uruchomienie
Układ został zaprojektowany na niewielkiej płytce jednostronnej pokazanej na rysunku 2 i jego montaż nie powinien nastręczać trudności Układ LI2 najlepiej jest umieścić w podstawce. Złącze J1 śluzy do doprowadzania napięcia zasilania oraz sygnałów sterujących pracą urządzenia. Linie CLK, DIR i /OE akceptują TYLKO poziomy TTI. (maks. 5V). Do złącza J2 należy dołączyć silnik. Styki Sl-S4 należy podłączyć do odpowiednich wyprowadzeń cewek silnika, a styk +12Vdo wyprowadzenia wspólnego. Prąd maksymalny zastosowanych tranzystorów wynosi 500mA, co
umożliwia sterowanie małym silnikiem krokowym. Zwory JP1 i JP2 służą do ręcznego ustawiania zachowania układu w przypadku, gdy nie ma potrzeby doprowadzania części sygnałów z zewnątrz. Zwora JP1 steruje wyjściami układu. Jeśli jest ona zwarta, układ pracuje normalnie, zaś po jej zdjęciu wszystkie cewki silnika zostają odłączone. JP2 odpowiada za kierunek obrotów silnika. Jeśli zwarte są dolne styki, cewki załączane są w kolejności od SI do S4. Przy zwartych górnych stykach układ pracuje odwrotnie. Jeśli sygnały /OE i DIR doprowadzone są do złącza Jl, zwory JP1 i JP2 należy usunąć. Zmontowany układ z zaprogramowanym GAL-em działa od razu i nie wymaga regulacji.
Witold Kardyś
Lixting 1
Name Ktukuwy;
PsrtNo Nonę;
Data 09/10/04/
Rbv1slon Dl;
Designer Witold Kardys; Company Monę;
Assembly Nonę;
Location Nonę;
Devi.ce g!6v9m3;
|
Wykaz elementów | |
|
Rezystory | |
|
R1-R4 ................ |
.........2,2kQ |
|
Kondensatory | |
|
C1 ............... |
.........lOOOpF |
|
C2.C3 .................... |
.......... 100aF |
|
Półprzewodniki | |
|
U1 ....................... |
...........78L05 |
|
U2.................. |
........GALI 678 |
|
Inne | |
|
JP1.JP2 ............... |
.coldp ny + zwo'ki |
/*• wejścia •*/
|
Pinl -clk; |
/• WcjacLc zegarowo |
*/ |
|
Pin 2 * dir; |
/* Wejacie kieronkow obrotow |
*/ |
|
Pi n 11 • n*; |
/* W^jgcie sterujące buforem wyjściowym | |
|
/** Wyjścia ••/ | ||
|
Pin [12..15] - (03..0); |
/* Wyjścia sterujące cewkami | |
|
/** deklaracja Kolejnych |
3tanów w/jsc *•/ | |
|
field count - (03..D]; |
/* pole bitowe licznika */ | |
|
$dofino 80 'b'0D01 |
/* 1 otany wyjoo */ | |
|
$d«fino SI 1b'0311 |
/* 3 •/ | |
|
Srtefine S? 'h^lllD |
/* 2 */ | |
|
Sdefine S3 'b'0110 |
/» 6 ’/ | |
|
$define S4 'b'0100 |
/' 4 '/ | |
|
Sdefine S5 'b'1100 |
/* 12 */ | |
|
$define S6 'bUOOD |
/* 8 •/ | |
|
Sdefine S7 'b'1301 |
/* 9 V | |
|
Sdefine sx 'b'0000 |
/» stan początkowy •/ | |
|
/** równania logiczne ** |
/ | |
|
Sequenced count { |
/* 7alacz«nie kolejnych |
cewek s |
|
present S0 if dir |
next SI; | |
|
if !dir |
next S7; | |
|
present SI if dir |
next S2; | |
|
if !dir |
next SO; | |
|
present S2 if dir |
next SJ; | |
|
if '.dir |
next SI; | |
|
pieseul S3 if di: |
iicaU 34; | |
|
if Idir |
next 82; | |
|
present £4 if dir |
next S5; | |
|
if Idir |
next S3; | |
|
present S5 if dir |
next S6; | |
|
if !dir |
next S4; | |
|
present S6 if dir |
next S7; | |
|
if Idir |
next S5; | |
|
present S7 if dir |
next SO; | |
|
lr idir |
next Si; | |
|
presen- 3x next 30; |
/*■ »tan początkowy licznika */ | |
ł
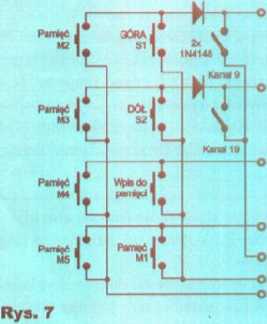
Ciąg dalszy ze strony l ?.
<k>K1l
doK12
do KI)
do K14
do KOI
doKQ2 do KO)
Jednocześnie w takim przypadku należy skorygować wartości pojemności rezonansowych (C12, C23). Opisany układ syntezy można również nieco uprościć konstrukcyjnie i przy tym nic nie stracić, tzn. zrezygnować z generatora zewnętrznego „opartego” o tranzystor T4 i wykorzystać generator wewnętrzny układu U2 (wyprowadzenia 6 i 7).
Roman Biadalski
roman. hicdalski@edw. com.pl
Elektronika dla Wszystkich Wrzesień 2005 19
Wyszukiwarka
Podobne podstrony:
Image10 (15) Projekty AVT ■ Projekty AVT ■ Rys. 4 Schemat montażowy sterownika. u 6 filtrujące K11),
Image74 (5) ■ Projekty AVT Rys. 3 Schemat montażowy czeka jeszcze nieco ponad minutę, aż czujka ruch
Image76 (5) ■ Projekty AVT Rys. 3 Schemat montażowy załączeniu triaka TRI w przypadku wzrostu napięc
Image127 (2) ■ Projekty AVT Rys. 1 Schemat ideowy Wyjście 1 Wyjfccl* 2 Wyjtcła 1 Wyjścia 4 R 220R/10
Image73 (3) Rys. 8 Schemat montażowy płytki■ Projekty AVT mowy kompilator 2 symulatorem - „AVR Studi
Image8 (25) _A__A__A_Projekty AVT ■ Rys. 1 Schemat ideowy W Elektronice dla Wszystkich zamieszczono
Image9 (16) ■ Projekty AVT b) Rys. 3 Schemat podstawowy ładowarki do akumulatora 12V. a) +vcc .u*
więcej podobnych podstron