Image13 (19)

Projekty AVT

mmmm

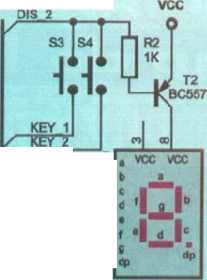
Proponowany układ służy do pomiaru prędkości obrotowej silników elektrycznych. Powstał on w wyniku zaistnienia potrzeby pomiaru prędkości obrotowej wirnika silnika asynchronicznego, jednak znakomicie nadaje się do innych celów, takich jak choćby pomiar prędkości obrotowej wentylatorów w komputerze. Główną zaletą prezentowanego urządzenia jest całkowicie bezinwazyjny pomiar, który polega na oświetleniu wirnika światłem stroboskopu, ustawieniu prędkości klawiszami aż do uzyskania nieruchomego obrazu i odczytaniu gotowego wyniku z wyświetlacza siedmiosegmentowego LED. Zaletą
Rya. 1 Schemat ideowy takiego rozwiązania jest możliwość pomiaru prędkości bardzo małych elementów wirujących oraz możliwość pomiaru bez zatrzymywania urządzenia.
Opis układu
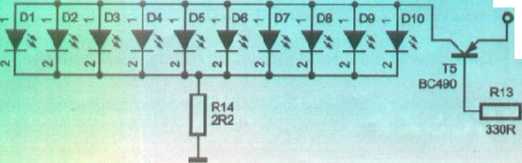
Schemat ideowy układu przedstawia rysunek l. Niewiele jest tu do omówienia, ponieważ większość „brudnej roboty” wykonuje mikrokontroler. Jako zasilanie zostały użyte cztery baterie wielkości AAA - małe paluszki. Napięcie z baterii jest podawane poprzez kondensatory filtrujące na mikrokontroler. Producent określa maksymalne napięcie pracy mikrokontrolera AT89C2051 jako 6,6V. dzięki czemu układ pracuje prawidłowo także dla now7ch baterii alkalicznych. Białe diody LED mają napięcie przewodzenia około 3V, dlate go napięcie zasilania musi być odpowiednio większe, aby podczas pracy impulsowej diod stroboskopu, dla każdej z diod popłynął prąd o wartości maksymalnej ok. 0,lA.
W przedstawionym układzie do oświetlenia służy I0 diod połączonych równolegle. Ponieważ sumaryczny prąd płynący przez 10 diod może wynieść około lA, tranzystor ten powinien mieć odpowiednią obciążalność prądową. Wymagane minimalne wzmocnienie hfC
Z1
vcc
O
Header 2
DIS*
0
vcc
Q
|
SEG F | ||
|
SEG_G |
6 | |
|
/ |
§EG~b |
4 |
|
-- |
SEtTć |
2 |
|
ścó“bp |
i | |
|
SEg~k |
h | |
|
§EG~B |
ió | |
|
SEG~ |
5 |
/
d 'IjłJ*' • IjJ;
DS4-
LED -WA
DIS_3
T4
BC557

DS3
LED-WA
|
KEY 1 | |||
|
/ |
KEY 2 | ||
|
/ |
segta |
f | |
|
SEg b |
6 | ||
|
/ |
4 | ||
|
SEG D |
2 | ||
|
✓ |
sEg~E |
i | |
|
SEG~E |
i) | ||
|
• |
SEG G |
10 | |
|
SEG ÓP |
5 | ||
DS2
LED-WA
/-5KTF
|
snrzr- |
t3 | ||
|
ŚEG D |
•i | ||
|
SEG C |
i | ||
|
iEGdp |
i | ||
|
- ? |
gA |
ś | |
|
EG b |
■ić | ||
|
SEG E |
6 | ||

D11
RED
SEG_DP
DS1
LED-WA
/
|
/ |
"SEG A |
7 |
|
/ |
SEG B |
0 |
|
/ |
"5ES“ć |
4 |
|
/ SEG d |
" 2 | |
|
SEG E |
i | |
|
■"3E5T |
9 | |
|
SEG G |
10 | |
C1 II SOpF
vcc o
r-Uc3
IB 2,2uF
XI
C2 || 30pF
10x WHfTE LED
i
3 20MHz
a
vcc
|
DIS 1 |
2 |
|
/ bis 2 |
5 |
|
/TPT- |
ś |
|
/HT3 |
7 |
|
/H5FH |
8 |
|
/ 'm~A |
$ |
TT
i-l
RST/VPP
XTAL2
KTAL1
P30(RXD)
P31(TXD)
P3.2(INT0)
P3.3(INT1)
P3.4(T0)
P3.5(T1)
P3.7
GND
VCC
cs_L
1Q0nF—p
CA
33CuF
P1.7 P1.6 P1.5 P1.4 P1.3 PI .2 P1.1(AIN1) P 1.0(AIH0)
|
19 |
R9 |
SEG E/ | |
|
-aa— |
SEG d/ 5nć c. | ||
|
16 |
mu |
~i ł~ —R5- |
^D> |
|
14 |
T. ł~ —RF- |
śfeG ćy SFr. A | |
|
12 |
R6 |
~1 ł~ | |
|
* R8 | |||
U1 ATB9C2051
Wrzesień 2006 Elektronika dla Wszystk
Wyszukiwarka
Podobne podstrony:
Image11 (19) ■ Projekty AVT mikroprocesorowej Osiej łączki. Rysunek 10 przedstawia mapę pamięci czuj
DSC00080 (42) Przedstawiona na ilustracji metoda pomiaru prędkość; przepływu wody służy do pomiaru p
Elektroakustyczna metoda w wersji skokowej (SEA) służy do pomiaru rozkładu natężenia pola elektryczn
14447 Image13 (12) ■ Projekty AVT Uwaga! Podczas użytkowaniu urządzenia w jego obwodach występują na
21172 Image12 (14) Projekty AVT Projekty AVT Nie wolno zbytnio zbliżać się do urządzenia podczas pra
Image11 (25) ■ Projekty AVT „liter” (LED). Obsługę wspomnianego programu testowego przybliża ry sune
więcej podobnych podstron