21503 skanuj0025 (115)
Wyznaczając środek chwilowego obrotu tnro/y 1 względem ostoi mamy (),, (punkt przecięcia więzi podporowych 112) 1 przyjmując przesunięcie obrócone punktu A (wektor AA") otrzymujemy kolejno BB", CC", DD" (wykorzystano więź podporową 3), EE", FF", GG" i HH" (nie wykorzystano kierunku więzi 4). Układ jest geometrycznie zmienny gdy kierunek więzi 4 pokrywa się z kierunkiem wektora HH"; tak nie jest, otrzymano sprzeczność — układ jest geometrycznie niezmienny.
Przedstawiona tu metoda (kinematyczna) w tym przypadku okazała się wyjątkowo efektywna i efektowna — bo analityczna jest mimo wszystko uciążliwa.
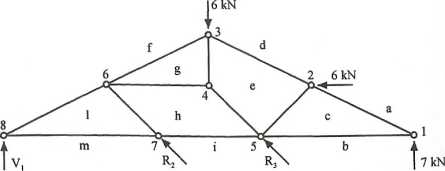
Plan ten można wykorzystać do wyznaczenia reakcji V4. Po usunięciu więzi w kierunku V4 otrzymujemy mechanizm, dla którego mamy już sporządzony plan przesunięć obróconych. Mechanizm obciążamy znanymi siłami czynnymi oraz siłą V4 przyłożoną w kierunku usuniętej więzi, co pokazano na rysunku. Wykorzystując zasadę prac przygotowanych obliczamy sumę momentów sił zewnętrznych względem końców wektorów przemieszczeń obróconych.
Wyznaczoną wartość skalarną przyrównujemy do zera:
L m IMir = 0.
Dla przyjętej wielkości wirtualnej A otrzymujemy:

stąd
• Znajomość sił zewnętrznych pozwala rozwiązań schemat w pełnym zakresie inną metodą, np. równoważenia węzłów w ujęciu graficznym. Możliwe to jest jednak, jeśli znane są liczbowe wartości sił. Niniejsze zadanie charakteryzuje się tym, że wystarczy znajomość reakcji V4 (i sił czynnych), by rozwiązać zadanie całkowicie.
Przyjmujemy zatem Pt = P2 = 6 kN, wtedy

Plan Cremony sporządza się dla następujących
oznaczeń pól
(znakowanie
Bowa)
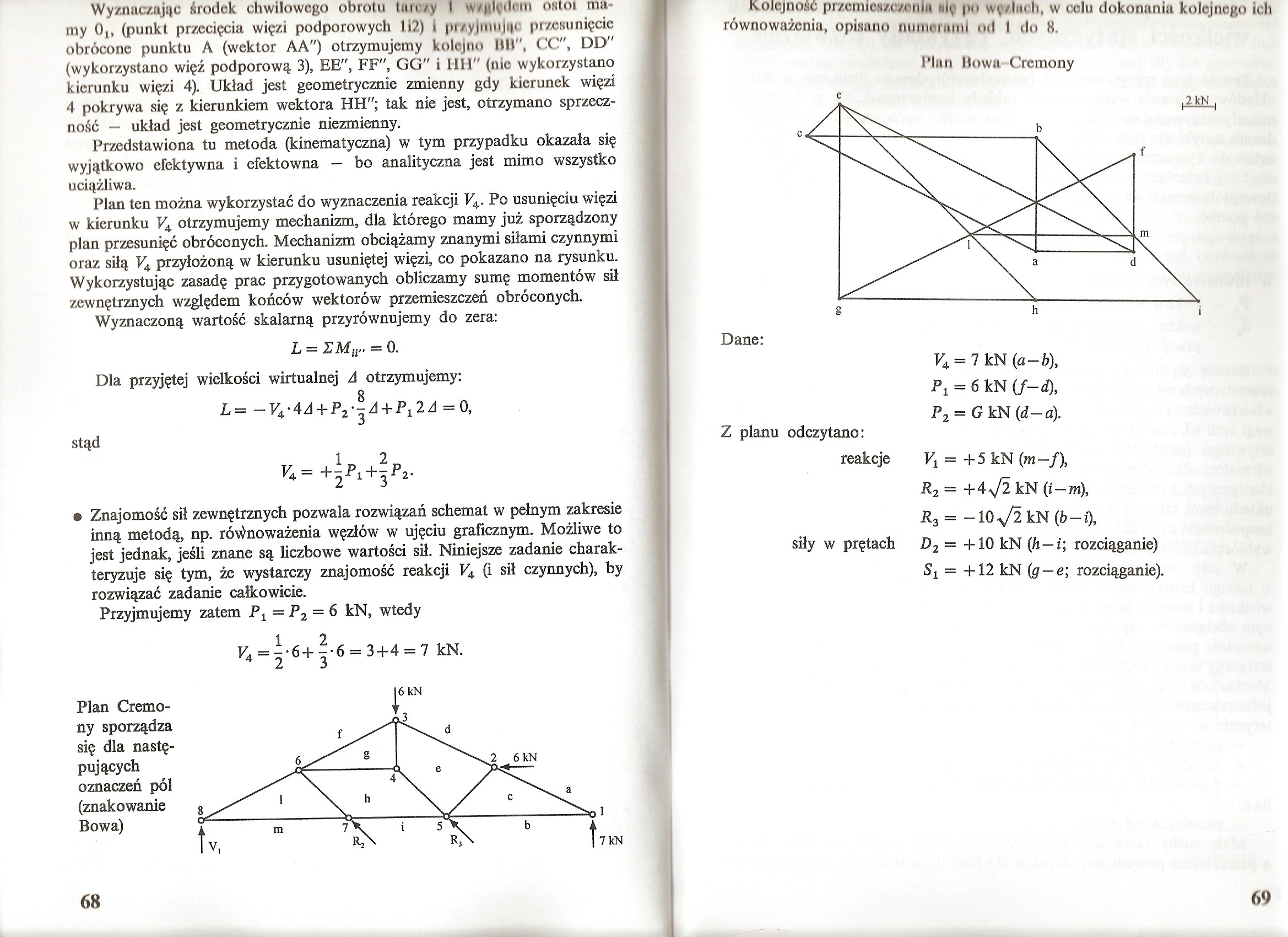
Kolejność przemieszczeniu ni? po Wfllach, w celu dokonania kolejnego ich równoważenia, opisano numoruml od 1 do 8.
Plan Bowa-Cremony
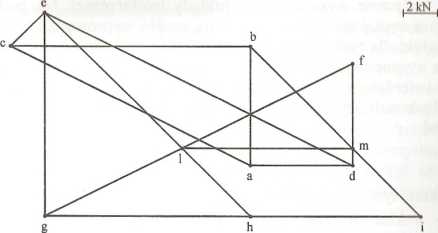
Dane:
F4 = 7kN(a-h), P^ókNtf-d),
P2 = G kN (d—a).
Z planu odczytano:
reakcje = +5 kN (w—/),
R2 = +4y/2 kN (i-m),
R3 = -10V^kN (b-i),
siły w prętach D2 = +10 kN (h—i; rozciąganie) Si — +12 kN (g—e; rozciąganie).
69
Wyszukiwarka
Podobne podstrony:
5. Toczenie I - suma ruchów postępowego i obrotoweeo środek chwilowego obrotu - ruch złożony (toczen
17170 skanuj0021 (115) terminie, SN rozpatrując kasację utrzymał zaskarżone orzeczenie w mocy. Zażal
P1020089 (3) Wyznaczenie położenia chwilowych środków obrotu
P1020089 (3) Wyznaczenie położenia chwilowych środków obrotu
86749 Mechanika39 3. Ruch płaski - c.d.Chwilowa oś obrotu. S—chwilowy środek obrotu -
skanuj0013 (115) Ab1 W*, 1 p dS^ Ll -M s
więcej podobnych podstron