2tom232

Napęd elektryczny
prof. dr bab. inż. Kazimierz Bisztyga
6.1. Równanie ruchu napędu
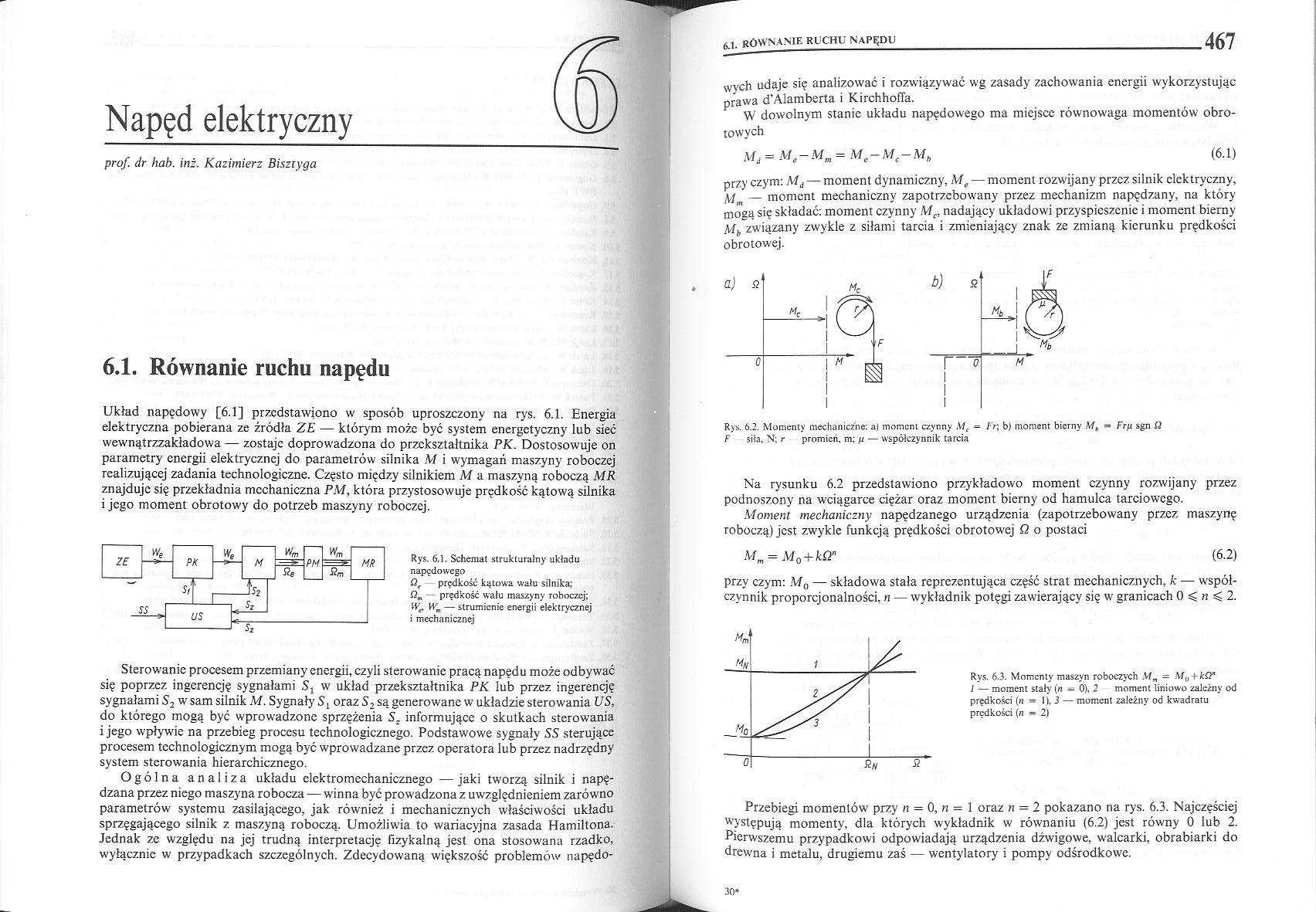
Układ napędowy [6.1] przedstawiono w sposób uproszczony na rys. 6.1. Energia elektryczna pobierana ze źródła ZE — którym może być system energetyczny lub sieć wewnątrzzakładowa — zostaje doprowadzona do przekształtnika PK. Dostosowuje on parametry energii elektrycznej do parametrów silnika M i wymagań maszyny roboczej realizującej zadania technologiczne. Często między silnikiem M a maszyną roboczą MR znajduje się przekładnia mechaniczna PM, która przystosowuje prędkość kątow'ą silnika i jego moment obrotowy do potrzeb maszyny roboczej.
Rys. 6.1. Schemat strukturalny układu napędowego
Qe prędkość kątowa wału silnika;
Qm - prędkość walu maszyny roboczej;
Wm — strumienie energii elektrycznej i mechanicznej
Sterowanie procesem przemiany energii, czyli sterowanie pracą napędu może odbywać się poprzez ingerencję sygnałami S1 w układ przekształtnika PK lub przez ingerencję sygnałami S2 w sam silnik M. Sygnały Si oraz S2 są generowane w układzie sterowania US, do którego mogą być wprowadzone sprzężenia S, informujące o skutkach sterowania i jego wrpływic na przebieg procesu technologicznego. Podstawowe sygnały SS sterujące procesem technologicznym mogą być wprowadzane przez operatora lub przez nadrzędny system sterowania hierarchicznego.
Ogólna analiza układu elektromechanicznego — jaki tworzą silnik i napędzana przez niego maszyna robocza — winna być prowadzona z uwzględnieniem zarówno parametrów systemu zasilającego, jak również i mechanicznych właściwości układu sprzęgającego silnik z maszyną roboczą. Umożliwia to wariacyjna zasada Hamiltona. Jednak ze względu na jej trudną interpretacje fizykalną jest ona stosowana rzadko, wyłącznie w' przypadkach szczególnych. Zdecydowaną większość problemów' napędowych udaje się analizować i rozwiązywać wg zasady zachowania energii wykorzystując prawa d’Alamberta i KirchhofTa.
W dowolnym stanie układu napędowego ma miejsce równowaga momentów obrotowych
= Me - Mm = Me - Mc - M„ (6.1)
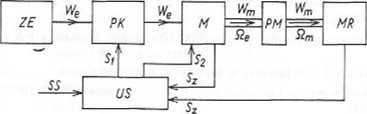
przy czym: Md—moment dynamiczny, Me — moment rozwijany przez silnik elektryczny, M„ — moment mechaniczny zapotrzebowany przez mechanizm napędzany, na który mogą się składać: moment czynny Mc, nadający układowi przyspieszenie i moment bierny Mh związany zwykle z siłami tarcia i zmieniający znak ze zmianą kierunku prędkości obrotowej.
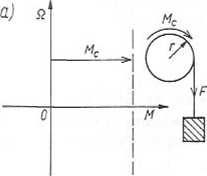
Rys. 6.2. Momenty mechaniczne: aj moment czynny Mt = /•>; bj moment bierny Af„ = Fru sgn £2 F siła. N: r promień, m; y. — współczynnik tarcia
Na rysunku 6.2 przedstawiono przykładowo moment czynny rozwijany przez podnoszony na wciągarce ciężar oraz moment bierny od hamulca tarciowego.
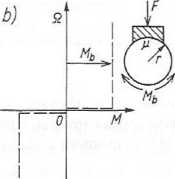
Moment mechaniczny napędzanego urządzenia (zapotrzebowany przez maszynę roboczą) jest zwykle funkcją prędkości obrotowej Q o postaci
Mm — M0 + kQ" (6.2)
przy czym: M0 — składowa stała reprezentująca część strat mechanicznych, k — współczynnik proporcjonalności, n — wykładnik potęgi zawierający się w granicach 0 < n < 2.
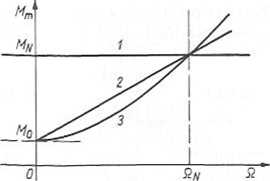
Rys. 6.3. Momenty maszyn roboczych Mm = M0+kQ"
I — moment stały (n = 0), 2 moment liniowo zależny od prędkości (n = 1), i — moment zależny od kwadratu prędkości (n = 2)
Przebiegi momentów przy n = 0, n = 1 oraz n = 2 pokazano na rys. 6.3. Najczęściej występują momenty, dla których wykładnik w równaniu (6.2) jest równy 0 lub 2. Pierwszemu przypadkowi odpowiadają urządzenia dźwigowe, walcarki, obrabiarki do drewna i metalu, drugiemu zaś — wentylatory i pompy odśrodkowe.
30*
Wyszukiwarka
Podobne podstrony:
2tom007 Urządzenia elektrostatyczne dr inż. Stanisław Bach <p. u, u, 1.4) prof. dr hab. inż. Kazi
skrypt002 (2) OPINIODAWCA Prof. dr hab. inż. Kazimierz Mikołajuk Politechnika WarszawskaOPRACOWALI P
KOMITET NAUKOWY XIX MSM prof. dr hab. inż. Bohdan Stadnyk - przewodniczący prof. dr hab. inż. Kazimi
skanuj0016 O ZESPOLE AUTORSKIM spawania drutami proszkowymi, prof. dr hab. inż. Piotr Adamiec i prof
skanuj0016 O ZESPOLE AUTORSKIM spawania drutami proszkowymi, prof. dr hab. inż. Piolr Adamiec i prof
PROFESOROWIEINSTYTUTU PODSTAW ELEKTROTECHNIKI I ELEKTROTECHNOLOGII Prof. dr hab. inż. Tadeusz Janows
IMG?69 (2) BELKI STATYCZNIE WYZNACZALNE Prowadzący prof. dr hab. inź. Kazimierz Wójs
000XIII SPIS TREŚCI Praca elektrowni w systemie elektroenergetycznym - prof. dr hab. inż. Franciszek
POLITECHNIKA ŚLĄSKA WŁADZE WYDZIAŁU ELEKTRYCZNEGO prof. dr hab. inż. Paweł Sowa WYDZIAŁ=
LUDZIE UCZELNI ■Jubileusz 80-lecia urodzin i 55-lecia pracy naukowej prof. dr. bab. inż. Zbigni
Szanowny Pan Prof dr bab. inż. Stanisław RADKO WSKI Dziekan Wydziału Samochodów i Maszyn
1tom320 Elektrotermia prof. dr hab. inż. Mieczysław Hering mgr inż. Wojciech Łobodziński13.1.
3tom128 Stacje elektroenergetyczne prof. dr hab. inż. Władysław Wasiluk dr inż. Tadeusz Sutkowski 4.
Prof. dr bab. inż. Jozef Portacha Opiekun naukowy KNE NEWE-08 TO BYŁA CIEKAWA POŻYTECZNA I DOBRZE ZO
DSC07270 prof. dr hib. inż. Kazimierz Flaga PoBSeefinflca Krakowska mgr inż. arch. Łukasz Flaga Poli
Kolejowej i drogowej prof dr hab inz. Kazimierz Furtak Rektor Politechniki
więcej podobnych podstron