32889 skanuj0020 (156)
pując go zrównoważonym układem sił osiowych) i wprowadzając do schematu pręt Z. Nowy schemat musi charakteryzować się geometryczną niezmiennością (w ogólnym przypadku łatwą do udowodnienia) i oczywiście statyczną wyznaczalnością. W naszym przypadku otrzymujemy schemat, w którym reakcje pozostają bez zmian. W zmodyfikowanym schemacie wyznaczenie sił nie powinno nastręczać istotnych kłopotów.
Wybrano następujący tok postępowania prowadzący do wyznaczenia sił w prętach kratownicy.
Równowaga węzła IPix = 0, —Glx+G2x—Q = 0, (1)

EPty — 0, — Gly+G2y+P+S — 0,
Z geometrii prętów wynika, że
Glx = y > G2x — 2G2r
Wykorzystując powyższe w równaniu (1) mamy
(4)
— Giy+G2y— - Q = 0
Rozwiązując układ równń (2) i (4) otrzymujemy
g2}=-\p+\q-\s
oraz Gly=(5)
Przekrój a-a
2
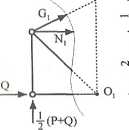
ZMi0l = 0,
Wl-2+G1I-3+i(P + e)-2 = 0, Nl-2-3P-jQ-3S+P+Q = 0,
po wykorzystaniu (3) i (5)
Nl=P+±Q+^S.
Przekrój /?-/?
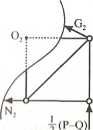
ZMi02 = 0,
N2‘2—G2/2—i(P —0*2 = 0,

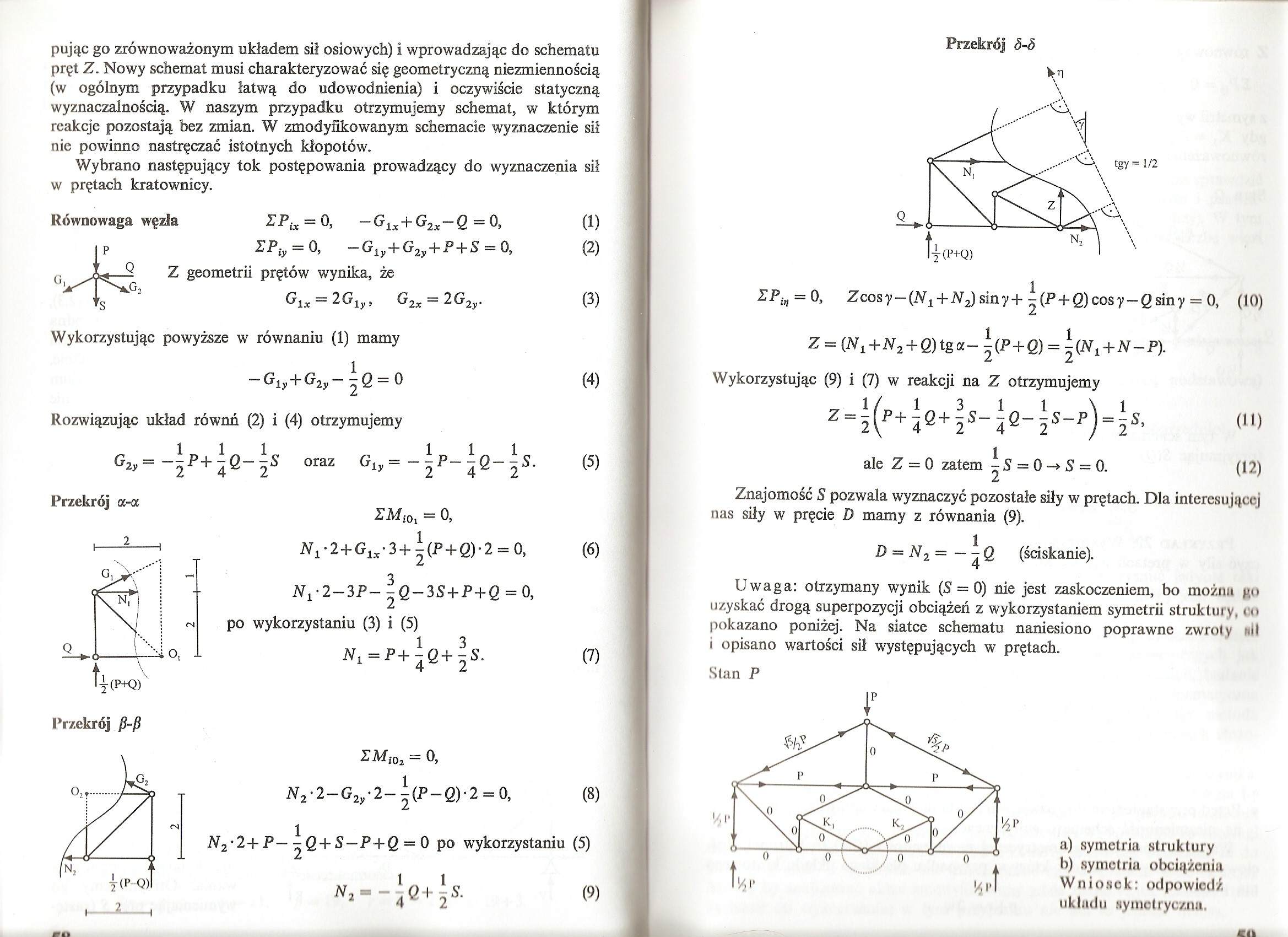
Przekrój <5-<5
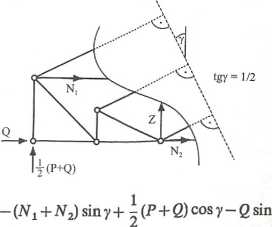
Z = +Q)tga- ^(J>+0 =
Wykorzystując (9) i (7) w reakcji na Z otrzymujemy
1/1 3 1 1 \1
Z = 2(P+4e+2S-42-2S-P) = 2S’ <">
ale Z = 0 zatem ^iS = 0-»5 = 0. (12)
Znajomość S pozwala wyznaczyć pozostałe siły w prętach. Dla interesującej nas siły w pręcie D mamy z równania (9).
D = N2 —

(ściskanie).
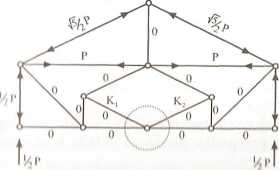
Uwaga: otrzymany wynik (S = 0) nie jest zaskoczeniem, bo można go uzyskać drogą superpozycji obciążeń z wykorzystaniem symetrii struktury, 00 pokazano poniżej. Na siatce schematu naniesiono poprawne zwroty nil i opisano wartości sił występujących w prętach.
Stan P
Jp
a) symetria struktury
b) symetria obciążenia Wniosok: odpowiodź układu symotryczna.
M
Wyszukiwarka
Podobne podstrony:
66047 skanuj0012 (338) 24 Arkusze knlkolncyjne J Ćwiczenia podsumowujące Ćwiczenie 1 Wprowadz
84003 skanuj0040 (75) substytucyjnego za pomocą hormonów i witamin oraz wprowadzenie do lecznictwa a
skanuj0005 34. Mucha tse-tse kłując skórę człowieka wprowadza do jego organizmu postać: a.
skanuj0011 (156) /f ry i , i f i %
skanuj0012 (156) stronica 9 EN ISO 14683:1999 UWAGA 1: Przytaczane wartości orientacyjne dotrzymano,
skanuj0015 (156) • Zebranie wiadomości na temat obserwowanych zjawisk przyrodniczy
skanuj0018 (156) i imię Nazwisko RO/wiązać ukłądf równań wszystkich liczb zespolonych Ć Narysować n
więcej podobnych podstron