60881 str169
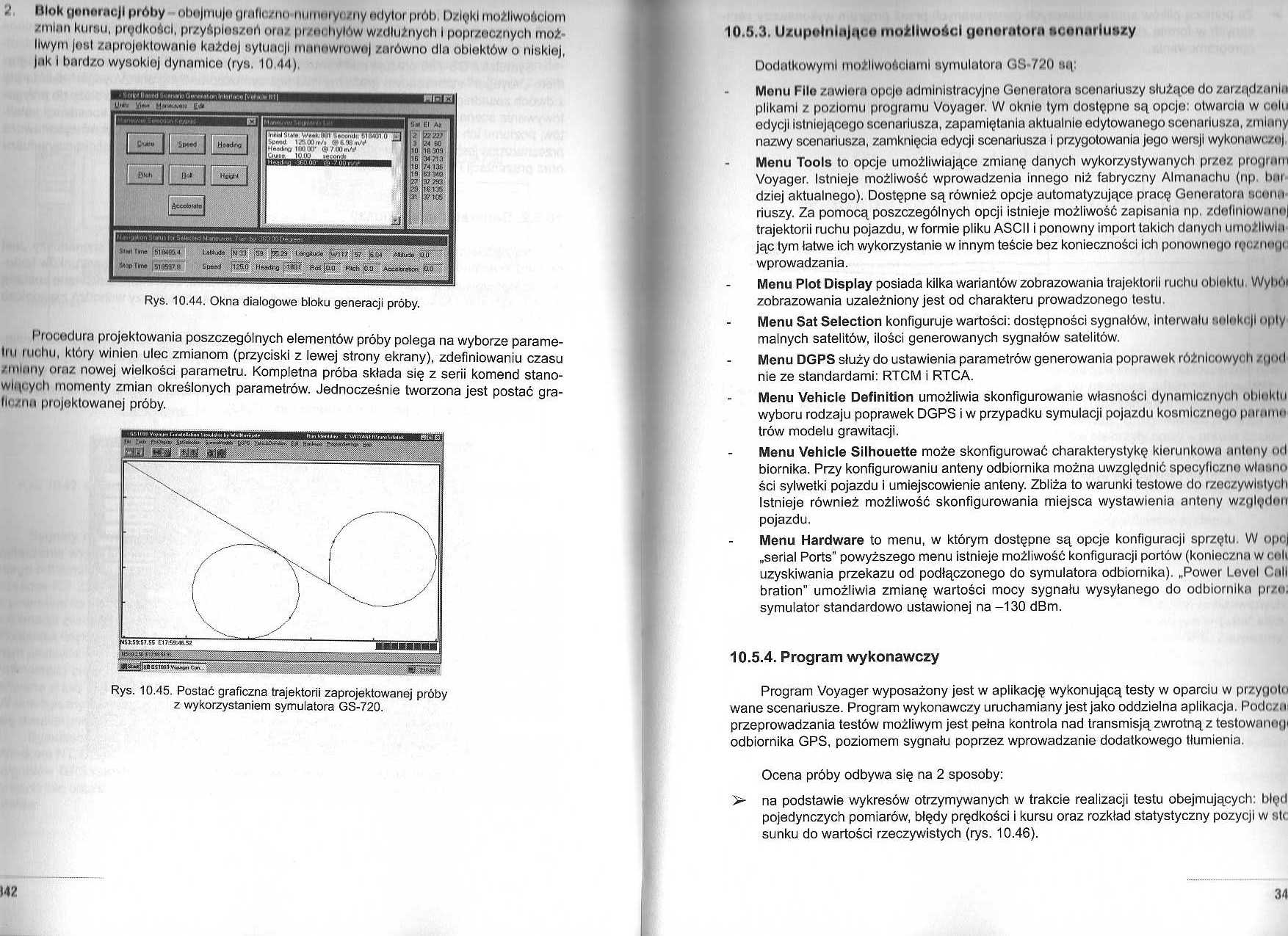
1 Blok flonorncjl próby obojmuj# flrnflr./nt> nummyf ,-ny ndytor prób Dzidki możliwościom /ml/in kursu, prędkości, przyśpieszeń 001/ pi/iu Iiyi<‘iw w/dlutnych I poprzecznych możliwym jest znprojiktowani® każdej aytuncjl mmmwrowej zarówno dla obiektów o niskiej, Juk I bnrdzo wysokiej dynamice (rys. 10.44).
Rys. 10.44. Okna dialogowe bloku generacji próby.
Procedura projektowania poszczególnych elementów próby polega na wyborze parame-im mchu, który winien ulec zmianom (przyciski z lewej strony ekrany), zdefiniowaniu czasu ••mlnny ornz nowej wielkości parametru. Kompletna próba sktada się z serii komend stanowiących momenty zmian określonych parametrów. Jednocześnie tworzona jest postać grali' /nu projektowanej próby.
|
l\ | ||
|
- |
\ \ / y | |
|
\ i |
\ \ | |
|
1 | ||
|
/ / |
y\( |
1 i |
|
1 |
1 ^ |
/ |
|
1, |
) / | |
|
s | ||
|
153:53:57.55 LI 7:03:46.52 IBlf 1B1 i | ||
|
...... |
........................- .... | |
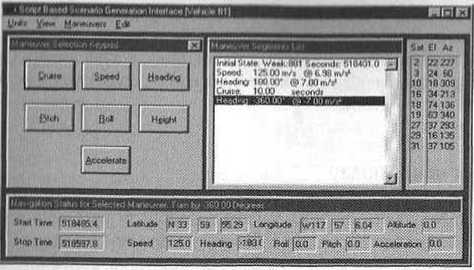
Rys. 10.45. Postać graficzna trajektorii zaprojektowanej próby z wykorzystaniem symulatora GS-720.
10.5.3. Uzupolnlnj^co możliwości yonomtorn nconnrhiHzy
Dodatkowymi możliwościami symulatora GS-720 hi(:
Menu Filo zawiera opcjo administracyjne Generatora scenariuszy służące do zarządzania plikami z poziomu programu Voyager. W oknie tym dostępne są opcje: otwarcia w colo edycji istniejącego scenariusza, zapamiętania aktualnie edytowanego scenariusza, zmiany nazwy scenariusza, zamknięcia edycji scenariusza I przygotowania jego wersji wykonawczo)
Menu Tools to opcje umożliwiające zmianę danych wykorzystywanych przez program Voyager. Istnieje możliwość wprowadzenia innego niż fabryczny Almanachu (np. hot dziej aktualnego). Dostępne są również opcje automatyzujące pracę Generatora neonu riuszy. Za pomocą poszczególnych opcji istnieje możliwość zapisania np, zdoflnlowano| trajektorii ruchu pojazdu, w formie pliku ASCII i ponowny import takich danych umożliwia jąc tym łatwe ich wykorzystanie w innym teście bez konieczności ich ponownego ręeznnil' wprowadzania.
Menu Plot Display posiada kilka wariantów zobrazowania trajektorii ruchu obiektu Wyból zobrazowania uzależniony jest od charakteru prowadzonego testu.
Menu Sat Selection konfiguruje wartości: dostępności sygnałów, Interwalu soloku|l opty malnych satelitów, ilości generowanych sygnałów satelitów.
Menu DGPS służy do ustawienia parametrów generowania poprawek różnii owyi li /u. ul nie ze standardami: RTCM i RTCA.
Menu Vehicle Definition umożliwia skonfigurowanie własności dynamicznych nhinklu wyboru rodzaju poprawek DGPS i w przypadku symulacji pojazdu kosmicznego pnuimn trów modelu grawitacji.
Menu Vehicle Silhouette może skonfigurować charakterystykę kierunkowo .miony ml biernika. Przy konfigurowaniu anteny odbiornika można uwzględnić specyficzno wlmum ści sylwetki pojazdu i umiejscowienie anteny. Zbliża to warunki testowe do rzeczywistych Istnieje również możliwość skonfigurowania miejsca wystawienia anteny względou pojazdu.
Menu Hardware to menu, w którym dostępne są opcje konfiguracji sprzętu. W opnj „serial Ports" powyższego menu istnieje możliwość konfiguracji portów (konieczna w i uli uzyskiwania przekazu od podłączonego do symulatora odbiornika). „Power Levol Cali bration” umożliwia zmianę wartości mocy sygnału wysyłanego do odbiornika pizn. symulator standardowo ustawionej na -130 dBm.
10.5.4. Program wykonawczy
Program Voyager wyposażony jest w aplikację wykonującą testy w oparciu w przygoli > wane scenariusze. Program wykonawczy uruchamiany jest jako oddzielna aplikacja. Podr za przeprowadzania testów możliwym jest pełna kontrola nad transmisją zwrotną z testowni u >< p odbiornika GPS, poziomem sygnału poprzez wprowadzanie dodatkowego tłumienia.
Ocena próby odbywa się na 2 sposoby:
>• na podstawie wykresów otrzymywanych w trakcie realizacji testu obejmujących: błęd pojedynczych pomiarów, błędy prędkości i kursu oraz rozkład statystyczny pozycji w str sunku do wartości rzeczywistych (rys. 10.46).
34
Wyszukiwarka
Podobne podstrony:
5 (893) 2. Obliczyć wartości AA=Atigo-Ato dla próby odczynnikowej (AAo), wzorcowego roztworu Troloks
188 Cukry 2. Próby inkubować 5 minut we wrzącej łaźni wodnej. Po ochłodzeniu dodać 6 ml wod;-destylo
S Function blok Błock Parameters: S-Funcłion rS-Function User-definable błock. Blocks may be written
Nt ilii** prr*kirnt* Kd and i-.dna Stclf.in dliplaycd chaiactcr and Iradmliłp IrttkMM
Wykonane również próby zbrojenia za pomocą wklejonych blach stalowych. Ostatnio badano możliwość
skanuj0010 stawić w temperaturze pokojowej. W celu lepszego dostępu tlenu, próby od 1—4 co pewien cz
więcej podobnych podstron