64119 skanuj0004 (322)
V£-3
SOcOoOl\<£onj
A.ico/
u
Wo><ui
0,-ro\jQs\m, Cy (^-O^^TirOclcA^i
10 iC
(poefces-c/
Ck
e>r
TTJ7
•\W&)
^s=- e-\ft&i
*CO
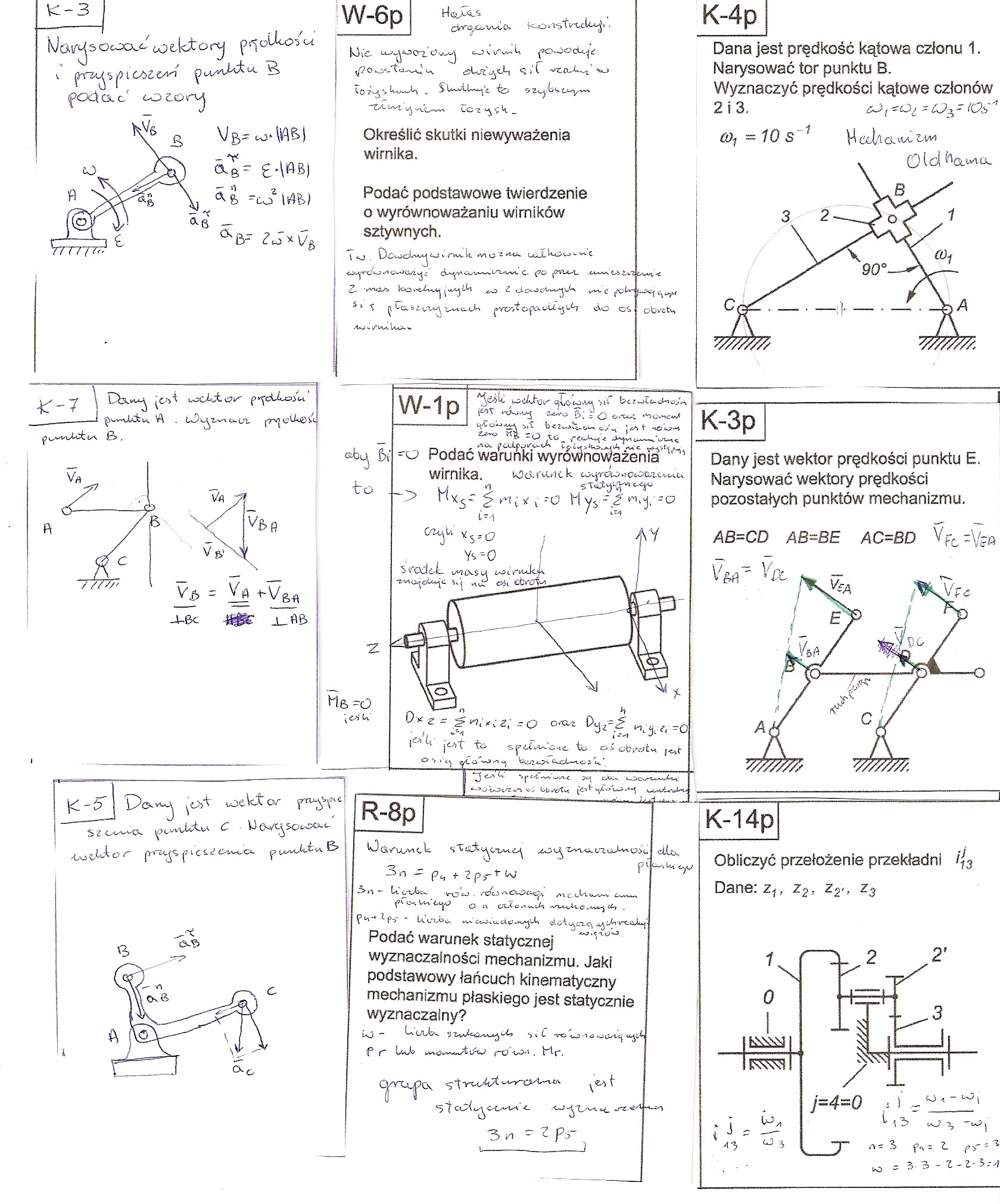
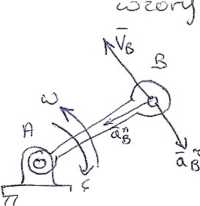
^ __ ~£ \ ,o3 <^cMk.v?>r p^cLLoiu.
—-! ę>-wvictuv \A . U>^v^v O-CT, |'TV[
^ ^A/V\*XO^I UA. B.
'o^vw\ . c3 tocWti
^łjdO'x c?v*-*^ t—5 v \r U. ^OvoocU^fr
^ <fcO
Ov(
yc-i ^ ę k. _
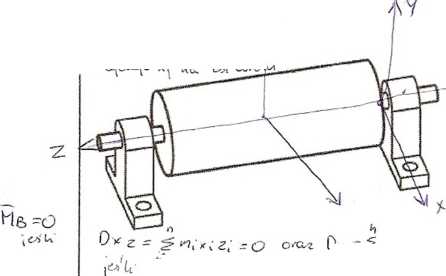
Określić skutki niewyważenia wirnika.
Podać podstawowe twierdzenie o wyrównoważaniu wirników sztywnych.
o Dc^oot
iw v /“IW. U
2, -/wa^ i<0 2 cl C*-5 ■'-'^ v^v c j
11 ^ j\ '-c.iŁ \,x^\ ^YT>V^CJp:>.t|U.cji.i7 sio o<>
-•VO i. /WA Wa>- *»
Zv7
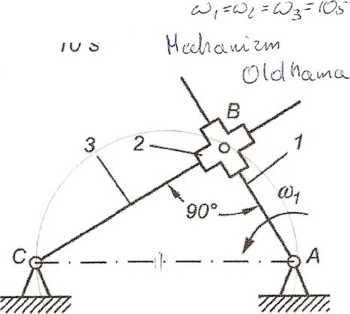
Dana jest prędkość kątowa członu 1. Narysować tor punktu B.
Wyznaczyć prędkości kątowe członów 2 i 3.
Cfy ■ n~1
obv-£tv,
v^>cAt"o^* ’>tt ?<-Uo-cbio>-\
jMT >0^.-^ łJ-o F>; i <3 o.-Łt-i
-»t t«Oi.o« c/^ ;^> t noO-1
, A<*. Zy J, b. i
«bą di -o Podać warunki wy równoważenia wirnika. i0<j.('u.»ic k tOvjrtohcłOCw , 3
-> Hxr' £ ^t --O H vs '-/ *"^3 i=^i ^
c^ju *SsC>
0
to
Y 4=0
Sv'CXdd-t_ i^uxsu łoc ri-uji-i.
3 ^.t,
'O2 ^ ^ -O
- » X--"? ^
j^T fe. s^a^óKŁ tb ciiobi^t^ j^,f
' Y . ^ W/7.
*J j»C-t CAKX <-w
w>c/z-«ż-> c.bt^rCvt i^ciioa^ ł^wćw-cii^t-
-- ', --—w.---+ -
~n
uj ^Ot uOCKACV f«W*fŁ ^-0^ o U^socoo-b . ^o(l/(Jt o (? i t^e^CŁ p uW-j3 & ;
Dany jest wektor prędkości punktu E. Narysować wektory prędkości pozostałych punktów' mechanizmu.
AB=CD AB-BE AC-BD VFc%ft
|
'X. Vfea | |
|
E^> / L\4a/ |
/ / —) |
A,

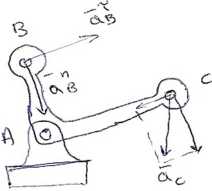
3.1 -= p^, + 2 ps-t uj
3.1 - U.‘o-ufc^ toO . .'C>t^-CbpC^Cp. AltxUŁv* ^ f OsWŁ<yJ o „ wukc^ci,
^ p-.> - U.caA5v. wv. _^UnVX.cJ^
Podać warunek statycznej wyznaczafności mechanizmu. Jaki podstawowy łańcuch kinematyczny mechanizmu płaskiego jest statycznie wyznaczainy?
O *“ t CA>Ui 5 1 -1 <? Cć^^i-
f* r" U3 n^.ovwt c!^ ro”bM, rlr.
O
yrxj^0\ st ^ (
^ CuPi <_ <—3 -^X--'"u"3 'K, ^rt '“
3 K. - ^ P
Obliczyć przełożenie przekładni i{3 Dane:zł7 z2, z2-, z3
k\\W1
1
2'
3
t-U *2^ |
i * S fi - z
'13 ° 3
-33- Z-l $--/l
Wyszukiwarka
Podobne podstrony:
skanuj0004 (322) V£-3 SOcOoOl<£onj A.ico/ uW-6p Wo><ui 0,-rojQsm, Cy
skanuj0009 (322)
skanuj0007 (322) 169 Ćwiczenie 21 zmiany napięcia na kondensatorze generatora drgań relaksacyjnych.
skanuj0008 (322) Masa budyniowa: • 4 szklanki mleka • 250 g masł
skanuj0009 (34) PRAWO CYWILNE I HANDLOWEWydział Zarządzania UW, II MSD. egzamin zima 2007/2G08 Itmr
skanuj0017 322 ABSTRAKCJA Bronisław Kierzkowski, Kompozycja fakturowa nr 5 (1959), gips, metal 135 x
43171 skanuj0005 (322) Dostojność mInmi I ilunliiJnoAó boh&toro tę przypisuje pracy górniku I hu
skanuj0001 (322) 4 4$ 2&AM°>t) 1 3 4o A - oWj£ P>-^< C--^ T>- -łt n? 3- O g £ Ądooi,
skanuj0005 (322) Dostojność mInmi I ilunliiJnoAó boh&toro tę przypisuje pracy górniku I hutnika,
więcej podobnych podstron