22470 str007
Tablica 1.2
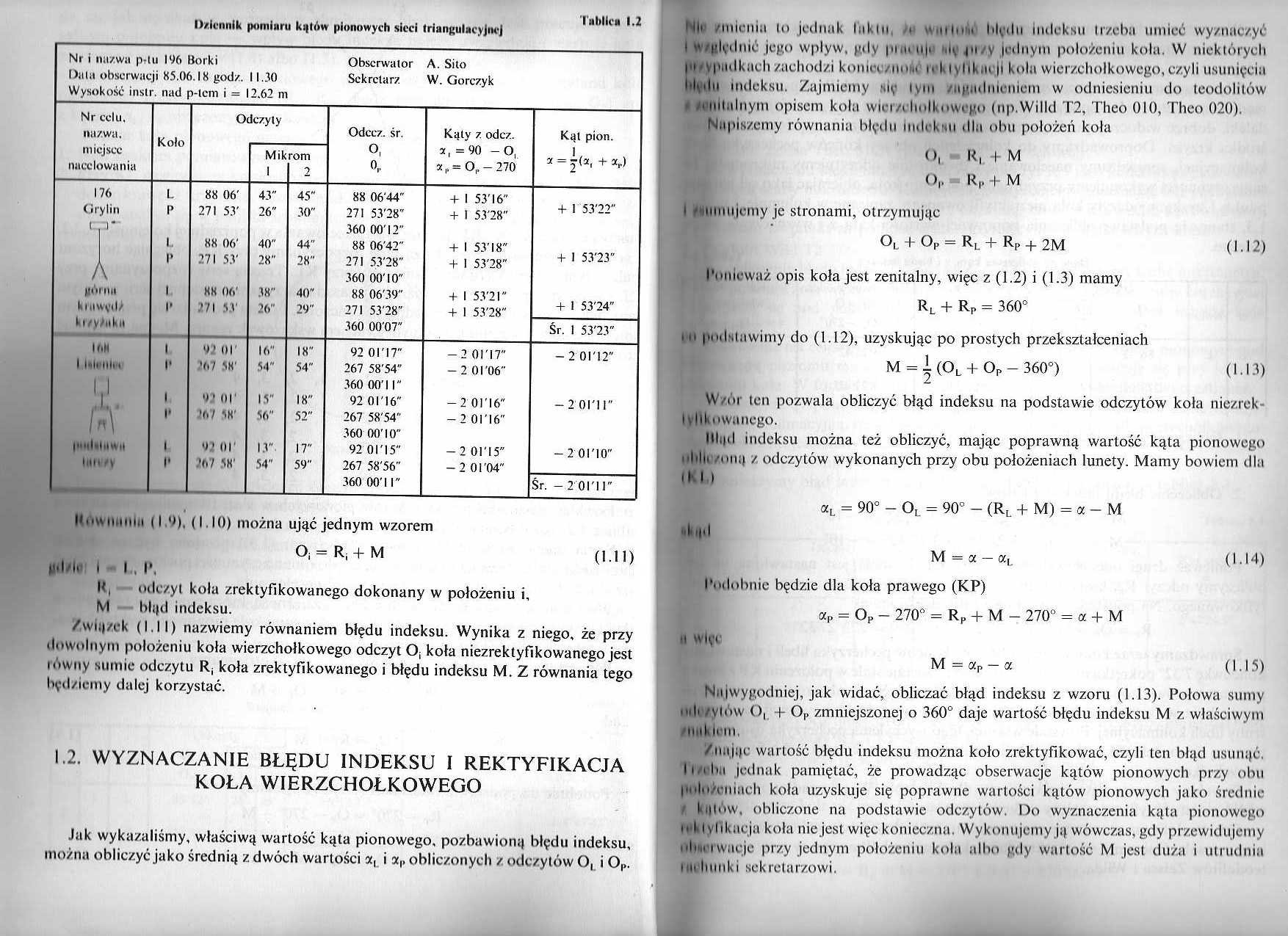
Dziennik pomiaru kipów pionowych sieci triangulacyjnej
|
Nr i nazwa pitn 1% Borki |
Obserwator |
A. Sito | ||||||
|
Dula obserwacji 85.06.18 godz. |
11.30 |
Sekretarz |
W. Gorczyk | |||||
|
Wysokość inslr. nad p-tem i = 12.62 ni | ||||||||
|
Nr celu, nazwa. |
Koto |
Odczyty |
Odecz. śr. |
K<py z odcz. a, =90 -O, st, = 0,-270 |
Kąt pion. | |||
|
miejsce mice Iowa nia |
Mik 1 |
rom 2 |
o, o, |
1 / « = j(a, + a,.) | ||||
|
176 |
L |
88 06' |
43" |
45" |
88 06'44" |
+ 1 53'16" |
+ I 53'22” | |
|
Gry lin |
P |
271 5.V |
26" |
30" |
271 53'28" |
+ 1 53'28" | ||
|
l* |
360 00' 12" | |||||||
|
L |
88 06' |
40" |
44" |
88 06'42" |
+ 1 53’18" |
+ 1 53'23" | ||
|
/ |
\ |
P |
271 5.V |
28" |
28" |
271 53'28" 360 00'10" |
+ 1 53'28" | |
|
yónm khiwv<)> |
1 P |
88 06' 271 5,V |
38" 26" |
40" 29" |
88 06'39" 271 53'28” |
+ 1 53'2I" + 1 53'28" |
+ 1 53'24" | |
|
l> • zy>nWi« |
360 00'07" |
Śr. 1 53'23" | ||||||
|
..... |
1 |
92 01' |
16" |
18" |
92 0117" |
-2 0117" |
- 2 0I'12" | |
|
1 l»litllli‘i |
1* |
767 58' |
54" |
54" |
267 58'54" |
- 2 01'06" | ||
|
1 |
1 |
360 00'11" | ||||||
|
l' |
1 |
92 01' |
15" |
18" |
92 0I'I6" |
- 2 01'I6" |
-2 0l'll" | |
|
/ |
n\ |
V |
267 58’ |
56" |
52" |
267 58'54" 360 00'10" |
- 2 0116" | |
|
piilUllIWlI |
1 |
'» or |
13". |
17" |
92 0115" |
— 2 0115" |
— 2'0P10" | |
|
lnu /y |
1' |
.'67 58' |
54" |
59" |
267 58'56" |
- 2 0104" | ||
|
360 00'1 1” |
Śr. -2 0I'I1" | |||||||
l<"" n 111 •. i (I.*)). (1.10) można ująć jednym wzorem
0;=R, + M (1.11)
jjił/li1 i I., I'.
K, odczyt kola /rektyfikowanego dokonany w położeniu i,
M błąd indeksu.
/ wią/ek (1. 11) nazwiemy równaniem błędu indeksu. Wynika z niego, że przy dowolnym położeniu koła wierzchołkowego odczyt O, koła niezreklyfikowanego jest lówny sumie odczytu R, koła zrektyfikowanego i błędu indeksu M. Z równania tego będ/iemy dalej korzystać.
12. WYZNACZANIE BŁĘDU INDEKSU I REKTYFIKACJA KOŁA WIERZCHOŁKOWEGO
Jak wykazaliśmy, właściwą wartość kąta pionowego, pozbawioną błędu indeksu, można obliczyć jako średnią /.dwóch wartości a, i ot,. obliczonych z odczytów O, i O,..
i III /mieniu to jednak liikm,......1• > I>1.,<Iu indeksu Ir/eba umieć wyznaczyć
< •• /itlędniii jego wpływ, gds pim u|i ,i«. pi/v icdnym położeniu kola, W niektórych (•iMpadkucli zachodzi konia /iu> • • l i, 11k ,u |i kola wierzchołkowego, czyli usunięciu ld\thi indeksu. Zajmiemy mc ivui iigadnicniem w odniesieniu do teodolitów ‘ iiilalnym opisem koła wici a hnlknwrgo (np.Willd T2, Theo 010, Theo 020). Napiszemy równania błędu m>l> kmii dla obu położeń koła
O, R, + M
<),. Rp+M
i aiinnjemy je stronami, otrzymując
o, +Op= Rl+ Rp + 2M (1.12)
1’onieważ opis koła jest zenitalny, więc z (1.2) i (1.3) mamy
Rl + RP = 360°
i o podstawimy do (1.12), uzyskując po prostych przekształceniach
M = 1 (Ol + 0P - 360°) (1.13)
W,mu ten pozwala obliczyć błąd indeksu na podstawie odczytów koła niezrek i\ Okuwanego.
Itli|d indeksu można też obliczyć, mając poprawną wartość kąta pionowego dilli /oną / odczytów wykonanych przy obu położeniach lunety. Mamy bowiem dla (II)
aL = 90° - 0L = 90° - (RL + M) = a - M
m|i |d
M = a — a, (1.14)
Podobnie będzie dla koła prawego (KP)
dp = Op - 270° = RP + M - 270° = a + M
II Więc
M = aP — a (1.15)
Najwygodniej, jak widać, obliczać błąd indeksu z wzoru (1.13). Polowa sumy mli stów O, f Op zmniejszonej o 360° daje wartość błędu indeksu M /. właściwym miii k leni.
/nająć wartość błędu indeksu można koło zrektyfikować, czyli ten błąd usunąć, li i bu jednak pamiętać, że prowadząc obserwacje kątów pionowych przy obu p"lii/cniach koła uzyskuje się poprawne wartości kątów pionowych jako średnic kipów, obliczone na podstawie odczytów. Do wyznaczenia kąta pionowego u l lylikacja koła nie jest więc konieczna. Wykonujemy ją wówczas, gdy przewidujemy iiUrrwncje przy jednym położeniu kola albo gdy wartość M jest duża i utrudnia i ni huiiki sekretarzowi.
Wyszukiwarka
Podobne podstrony:
geodezja0005 Tabela 2.4.2. Dziennik pomiaru kątów pionowych Numer stanowiska Oznaczenie celu I poł
skan080 Str.trR H■u IrR H Dziennik pomiaru kątów pionowych Oznaczenie celu I położenie lunety II
35600 strona3 (4) DZIENNIK POMIARU TRYGONOMETRYCZNEGO PRZESTRZENNEGO WCIĘCIA W PRZÓD Nr KIM* Nr cd
Projekt realizacyjny ściągnięty metodą biegunową dziennik Dziennik pomiaru sytuacyjno - wysokościow
DSC01067 (3) O. 232 _ _____ s 860 Mmcut = - ~ 411*10* *215.1 Tablica 23. Pomiary krzywej komutacyjne
132 Dziennik Zarządzeń Dyrekcji Okręgu Poczt i Telegrafów Nr 2 Nazwa urzędu (agencji)
84 (99) r1’ab. 3-1- Dziorauk ?u>mia-ru kątów poziomych i pionowych £ DZIENNIK POMIARU KĄTÓW POZIO
85 (133) Tab,3 * 1 * • c • u, DZIENNIK POMIARU KĄTÓW POZIOMYCH I PIONOWYCH Numer stanowiska Cel do
85 (95) Tab. 3c»u DZIENNIK POMIARU KĄTÓW POZIOMYCH I PIONOWYCH Kąty poziome Kąly pionowe POLITECHNIK
53 (193) Tab7 2*4. Fragment dziennika pomiaru sieci ciągów niwelacyjn ✓*»DZIENNIK NIWELACJI REPERÓW
53 (258) Tatt 2*4* Fragment dziennika pomiaru sieci ciągów niwelacyjnychDZIENNIK NIWELACJI REPERÓW C
CCF20130611�002 Dziennik pomiaru kątów biegunowych i odległości: Stan Cel Odczyt koła poziomego [g
skanuj0005 (208) Dziennik pomiaru kątów metodą repetycyjnąPATĄ • 2.(3 03.
więcej podobnych podstron