372 (6)
8. WYRÓWNANIE ODPORNE NA BŁĘDY GRUBE
8.1. Założenia podstawowe
W praktyce geodezyjnej spotykamy niekiedy przypadki, gdy wyniki pomiaru są obarczone dużymi błędami. Takie błędy wynikają, na ogół, ze zwykłych omyłek w odczycie wskazań instrumentów pomiarowych, złej numeracji punktów, przekłamań w procesie transmisji danych i ich wstępnego przetwarzania. Duże błędy pomiaru mogą być także związane z chwilowymi, niespodziewanymi zaburzeniami pomiaru (np. szybką i trudną do ustalenia zmianą parametrów środowiska pomiarowego). Najogólniej, błędy o wskazanym charakterze nazywamy błędami grubymi, a obarczone nimi obserwacje - obserwacjami odstającymi.
Pamiętamy, że w rachunku wyrównawczym, ze względów formalnych, błąd pomiaru jest zastępowany poprawką v - ~e. Załóżmy, że błąd pomiaru, a tym samym i poprawka, ma rozkład normalny lub inny rozkład o podobnie nieograniczonej dziedzinie funkcji gęstości. Wówczas, co prawda z małym prawdopodobieństwem, można się spodziewać także dużych błędów pomiaru i dużych poprawek. Tę niedogodność, wynikającą z bezpośredniego przeniesienia probabilistycznych modeli reprezentowanych funkcjami gęstości do praktyki obliczeń, można wyeliminować przez wprowadzenie przedziału, w którym losowe poprawki mają wysokie, chociaż wyraźnie mniejsze od jedności, prawdopodobieństwo wystąpienia. Przedział taki będziemy nazywali przedziałem dopuszczalnym dla losowych poprawek i oznaczali przez i\v. Zakładając symetrię funkcji gęstości poprawki (błędu pomiaru), granice przedziału ustalimy w postaci
Av~ (~u\ u)
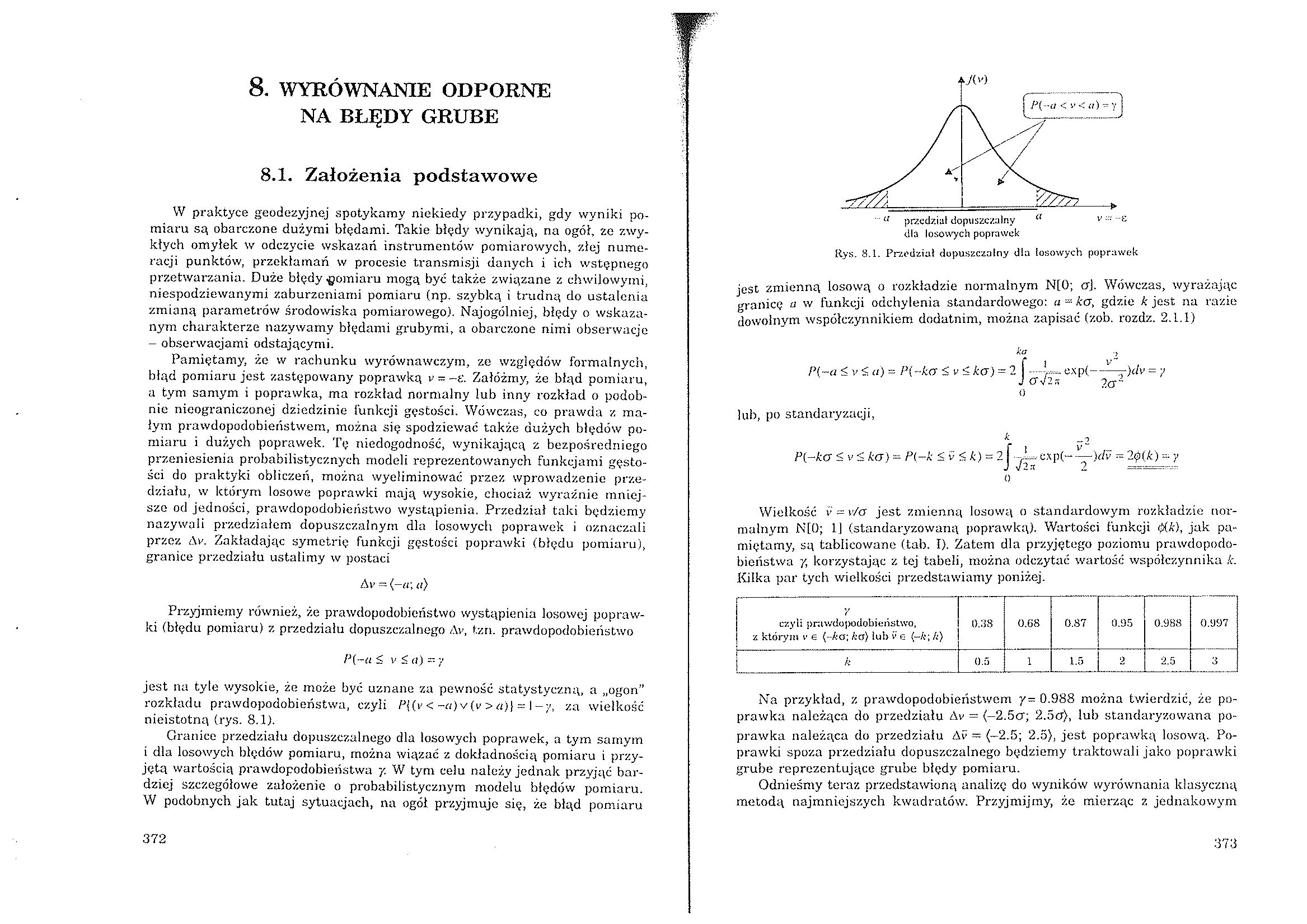
Przyjmiemy również, że prawdopodobieństwo wystąpienia losowej poprawki (błędu pomiaru) z przedziału dopuszczalnego Av. tzn. prawdopodobieństwo
P{ -u < v < a) ~ v
jest na tyle wysokie, że może być uznane za pewność statystyczną, a „ogon” rozkładu prawdopodobieństwa, czyli /■*{(v < -«) v(v > «)} = 1 za wielkość
nieistotną (rys. 8.1).
Granice przedziału dopuszczalnego dla losowych poprawek, a tym samym i dla losowych błędów pomiaru, można wiązać z dokładnością pomiaru i przyjętą wartością prawdopodobieństwa y. W tym celu nałoży jednak przyjąć bardziej szczegółowe założenie o probabilistycznym modelu błędów pomiaru. W podobnych jak tutaj sytuacjach, na ogół przyjmuje się, że błąd pomiaru
a przedział dopuszczalny a v~;~ k
dla losowych poprawek
Rys. 8.1. Przedział dopuszczalny dla losowych poprawek
jest zmienną losową o rozkładzie normalnym N[0; crj. Wówczas, wyrażając granicę o w funkcji odchylenia standardowego: a-ko, gdzie k jest na razie dowolnym współczynnikiem dodatnim, można zapisać (zob. rozdz. 2.1.1)
KCJ .y
P{-a < v < a) = P(~ko <v< ko) = 2 f........-U- exp(—-—-)dv = y
J Od2x 90-^
O
lub, po standaryzacji,
P(-ko < v < ko) ~ Pi-k < v < k) = 2 {" ?Lvexp(-- — )dv ~ 20(k) ~ y
o
Wielkość v - v/o jest zmienną losową o standardowym rozkładzie normalnym N[0; 1] (standaryzowaną poprawką). Wartości funkcji (pik), jak pamiętamy, są tablicowane (tab. I). Zatem dla przyjętego poziomu prawdopodobieństwa y, korzystając z tej tabeli, można odczytać wartość współczynnika k. Kilka par tych wielkości przedstawiamy poniżej.
|
y czyli pr:iwdo|X)clobiuńst\vo, z którym i- e (-Ara; ko) lub v 6 (-Ar; Ar) |
0.38 |
0.G8 |
0.87 |
0.95 |
0.988 |
0.997 |
|
i i k |
0.5 |
1 |
1.5 |
* |
2.5 |
3 |
I\ra przykład, z prawdopodobieństwem y- 0.988 można twierdzić, że poprawka należąca do przedziału Av = (-2.5a; 2.5er), lub standaryzowana poprawka należąca do przedziału Av = (-2.5; 2.5), jest poprawką losową. Poprawki spoza przedziału dopuszczalnego będziemy traktowali jako poprawki grube reprezentujące grube błędy pomiaru.
Odnieśmy teraz przedstawioną analizę do wyników wyrównania klasyczną metodą najmniejszych kwadratów. Przyjmijmy, że mierząc z jednakowym
373
Wyszukiwarka
Podobne podstrony:
Temat Niekwadratowe wskaźniki jakości w odpornej na błędy qrube identyfikacji modeli ciąqłych Temat
DSC01065 (3) Tolerancja błędów (odporność na błąd) Dialog jest odporny na błędy jeśli pomimo błędu ;
442 (5) I ODPORNE WYRÓWNANIE SWOBODNE10.1. Założenia podstawowe Wpisowa dzenie We wprowadzeniu do po
■ Podstawowym założeniem budowy takiej sieci miała być jej odporność na zniszczenie
4. Wyznaczanie odporności na pękanie na podstawie liniowo-sprężystej mechaniki pękania Mechanika
Założenia i cele przedmiotu: Wykłady: Na wykładach przedstawione zostaną podstawowe zagadnienia
b 272 9. Materiały odporne na promieniowanie9.1. Podstawowe części współczesnego reaktora
Podstawy nauki o materiałach GĘSTOŚĆ [g/cm
Podstawy nauki o materiałach Porównanie wytrzymałości i odporności na
i użycia standardu na podstawie ujednoliconej check-listy. • Duża odporność na
Podstawy nauki o materiałach Staliwo odporne na ścieranie Staliwo odporne na ścieranie powinno się
Podstawy nauki o materiałachStaliwa odporne na ścieranie m Struktura i własności staliw © Copyright
Podstawy nauki o materiałach m Staliwa chromowe odporne na ścieranie Staliwa chromowe odporne na
więcej podobnych podstron