442 (5)
I ODPORNE WYRÓWNANIE SWOBODNE
10.1. Założenia podstawowe
Wpisowa dzenie
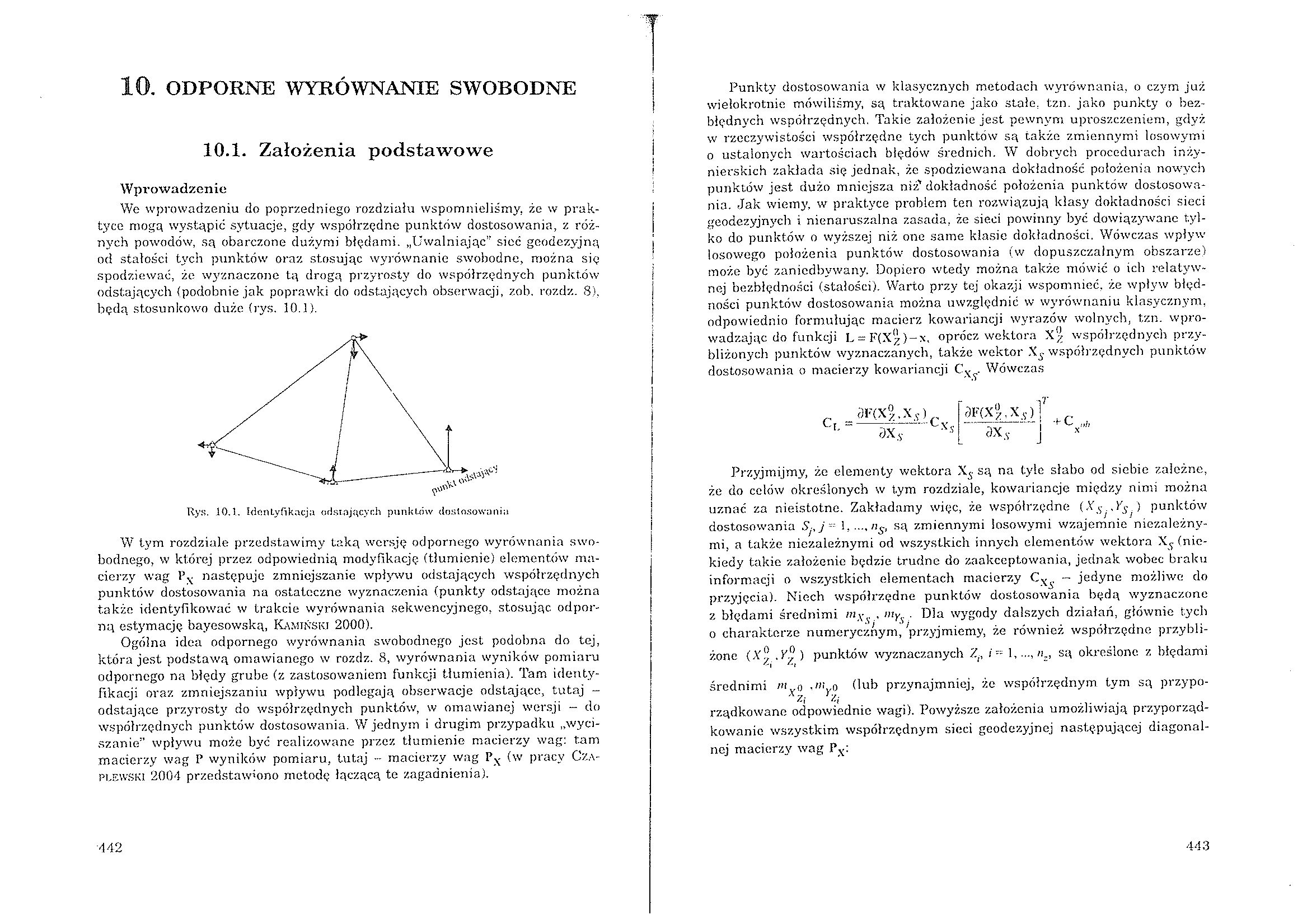
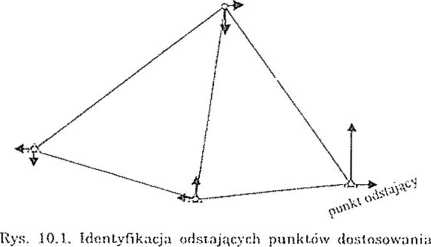
We wprowadzeniu do poprzedniego rozdziału wspomnieliśmy, że w praktyce mogp wystąpić sytuacje, gdy współrzędne punktów dostosowania, z różnych powodów, są obarczone dużymi błędami. „Uwalniając" sieć geodezyjną od stałości tych punktów oraz stosując wyrównanie swobodne, można się spodziewać, że wyznaczone tą drogą przyrosty do współrzędnych punktów odstających (podobnie jak poprawki clo odstających obserwacji, zob. rozdz. 8), będą stosunkowo duże (rys. 10.1).
W tym rozdziale przedstawimy taką wersję odpornego wyrównania swobodnego, w której przez odpowiednią modyfikację (tłumienie) elementów macierzy wag Px następuje zmniejszanie wpływu odstających współrzędnych punktów dostosowania na ostateczne wyznaczenia (punkty odstające można także identyfikować w trakcie wyrównania sekwencyjnego, stosując, odporną estymację bayesowską, Kamiński 2000).
Ogólna idea odpornego wyrównania swobodnego jest podobna do tej, która jest podstawą omawianego w rozdz. 8, wyrównania wyników pomiaru odpornego na błędy grube (z zastosowaniem funkcji tłumienia). Tam identyfikacji oraz zmniejszaniu wpływu podlegają obserwacje odstające, tutaj -odstające przyrosty do współrzędnych punktów, w omawianej wersji — do współrzędnych punktów dostosowania. W jednym i drugim przypadku „wyciszanie” wpływu może być realizowane przez tłumienie macierzy wag: tam macierzy wag P wyników pomiaru, tutaj - macierzy wag Px (w pracy Czapiewski 2004 przedstawiono metodę łączącą te zagadnienia).
Punkty dostosowania w klasycznych metodach wyrównania, o czym już wielokrotnie mówiliśmy, są traktowane jako stale, tzn. jako punkty o bezbłędnych współrzędnych. Takie założenie jest pewnym uproszczeniem, gdyż w rzeczywistości współrzędne tych punktów są także zmiennymi losowymi o ustalonych wartościach błędów średnich. W dobrych procedurach inżynierskich zakłada się jednak, że spodziewana dokładność położenia nowych punktów jest dużo mniejsza niż* dokładność położenia punktów dostosowania. Jak wiemy, w praktyce problem ten rozwiązują klasy dokładności sieci geodezyjnych i nienaruszalna zasada, że sieci powinny być do wiązywane tylko do punktów o wyższej niż one same klasie dokładności. Wówczas wpływ losowego położenia punktów dostosowania (w dopuszczalnym obszarze) może być zaniedbywany. Dopiero wtedy można także mówić o ich relatywnej bezbłędności (stałości). Warto przy tej okazji wspomnieć, że wpływ błędności punktów dostosowania można uwzględnić w wyrównaniu klasycznym, odpowiednio formułując macierz kowariancji wyrazów wolnych, tzn. wprowadzając do funkcji L = F(X-j)-n, oprócz wektora współrzędnych przybliżonych. punktów wyznaczanych, także wektor X^- współrzędnych punktów dostosowania o macierzy kowariancji Cx . Wówczas
Cr.
—------------ L\' ------------------! 'r U-
3X.v Xi[ 3X.V j
Przyjmijmy, że elementy wektora X^ są na tyle słabo od siebie zależne, że do celów określonych w t.ym rozdziale, kowariancje między nimi można uznać za nieistotne. Zakładamy więc, że współrzędne (X.s' .*5 > punktów dostosowania S-, j 1.....ns, są zmiennymi losowymi wzajemnie niezależny
mi, a także niezależnymi od wszystkich inny cli elementów wektora X^ (niekiedy takie założenie będzie trudne do zaakceptowania, jednak wobec braku informacji o wszystkich elementach macierzy CX(j. — jedyne możliwe do przyjęcia). Niech współrzędne punktów dostosowania będą wyznaczone z błędami średnimi ..., wy . Dla wygody dalszych działań, głównie tych o charakterze numerycznym, przyjmiemy, że również współrzędne przybliżone (Xy <Yy ) punktów wyznaczanych Z., /~ 1,.są określone z błędami
średnimi m o Hub przynajmniej, że współrzędnym tym są przypo-
Zi Zi
rządkowane odpowiednie wagi). Powyższe założenia umożliwiają przyporządkowanie wszystkim współrzędnym sieci geodezyjnej następującej diagonalnej macierzy wag Px:
443
Wyszukiwarka
Podobne podstrony:
448 (4) 10.2. Ekwiwalentne zadanie w odpornym wyrównaniu swobodnym Z przyjętych powyżej założeń wyni
444 (5) Pv- r _■> ’ ó,v!; m Xi
Podstawowe dane techniczne nowo wprowadzanych do produkcji regulatorów temperatury I Regulator
Podstawy Zarządzania ProjektamiProgram szkolenia 1. Wprowadzenie do zarządzania
Podstawy Zarządzania ProjektamiProgram szkolenia 1. Wprowadzenie do zarządzania
Podstawowa literaturaR. Elmasri, S. B. Navathe Wprowadzenie do systemów
Podstawowa literatura • CJ. Datę Wprowadzenie do systemów baz danych WNT 2000
372 (6) 8. WYRÓWNANIE ODPORNE NA BŁĘDY GRUBE8.1. Założenia podstawowe W praktyce geodezyjnej spotyka
4. Wyznaczanie odporności na pękanie na podstawie liniowo-sprężystej mechaniki pękania Mechanika
PODSTAWOWE POJĘCIA, DEFINICJE I ZAŁOŻENIA 7 PODSTAWOWE POJĘCIA, DEFINICJE I
6 (1464) ROZDZIAŁ 1 26 Zadanie &Klasyfikacja kapitałówI. ZałożeniaNa podstawie ewidencji księgow
Slajd16 Ci J v/uiivjłvuu i“wuuiu Przy tych założeniach pods
Założenia podstawowe do modułu STYPENDIARozdział III Założenia podstawowe do modułu
Założenia podstawowe do modułu STYPENDIA Dane dotyczące świadczeń studenta (które są związane z
podstawie przyjętych założeń zarówno stałych, jak i zmiennych, oraz wprowadzania do ksiąg rachunkowy
422 (4) "1 Wyrównanie swobodne W tym wyrównaniu przyjmujemy, że nieznanymi parametrami układu r
436 (6) Zgodnie z zasadami wyrównania swobodnego, zestawiamy macierz (macierz PAj jest obliczona w w
więcej podobnych podstron