cz2 str4
UNIKANIE BLOKAD
idea: przy każdym zamawianiu zasobów przez proces, system operacyjny decyduje czy ten proces ma czekać czy nie. Wymagana jest wcześniejsza informacja jak procesy będą zamawiać i zwalniać zasoby. Różne algorytmy wymagają różnych ilości i typów informacji.
Na podstawie deklaracji procesów o maksymalnej liczbie potrzebnych zasobów konstruuje się algorytmy przydzielania zasobów, tak aby system nie wszedł w stan blokady. Algorytm dynamicznie sprawdza stan przydziału zasobów i decyzja o przydziale podejmowana jest tak aby nie dopuścić do spełnienia warunku czekania cyklicznego.
Stan przydziału zasobów określony jest przez liczbę zasobów dostępnych, przydzielonych oraz przez maksymalne zapotrzebowania procesów.
Stan bezpieczny -
gdy istnieje ciąg bezpieczny procesów Pj,.. M P„ w' danym stanie przydziałów, tzn. taki, że dla każdego procesu Pj jego potencjalne zapotrzebowanie na zasoby musi być zaspokojone przez zasoby aktualnie dostępne oraz przez zasoby użytkowane przez procesy Pj, j<i.
Stan zagrożenia- gdy żaden taki ciąg nie istnieje.
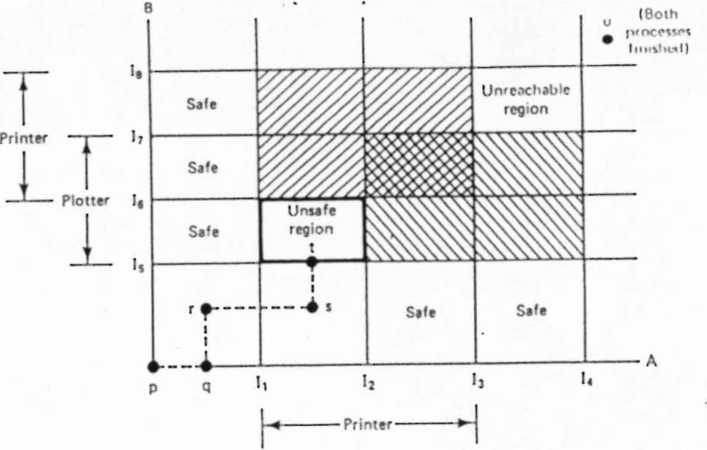
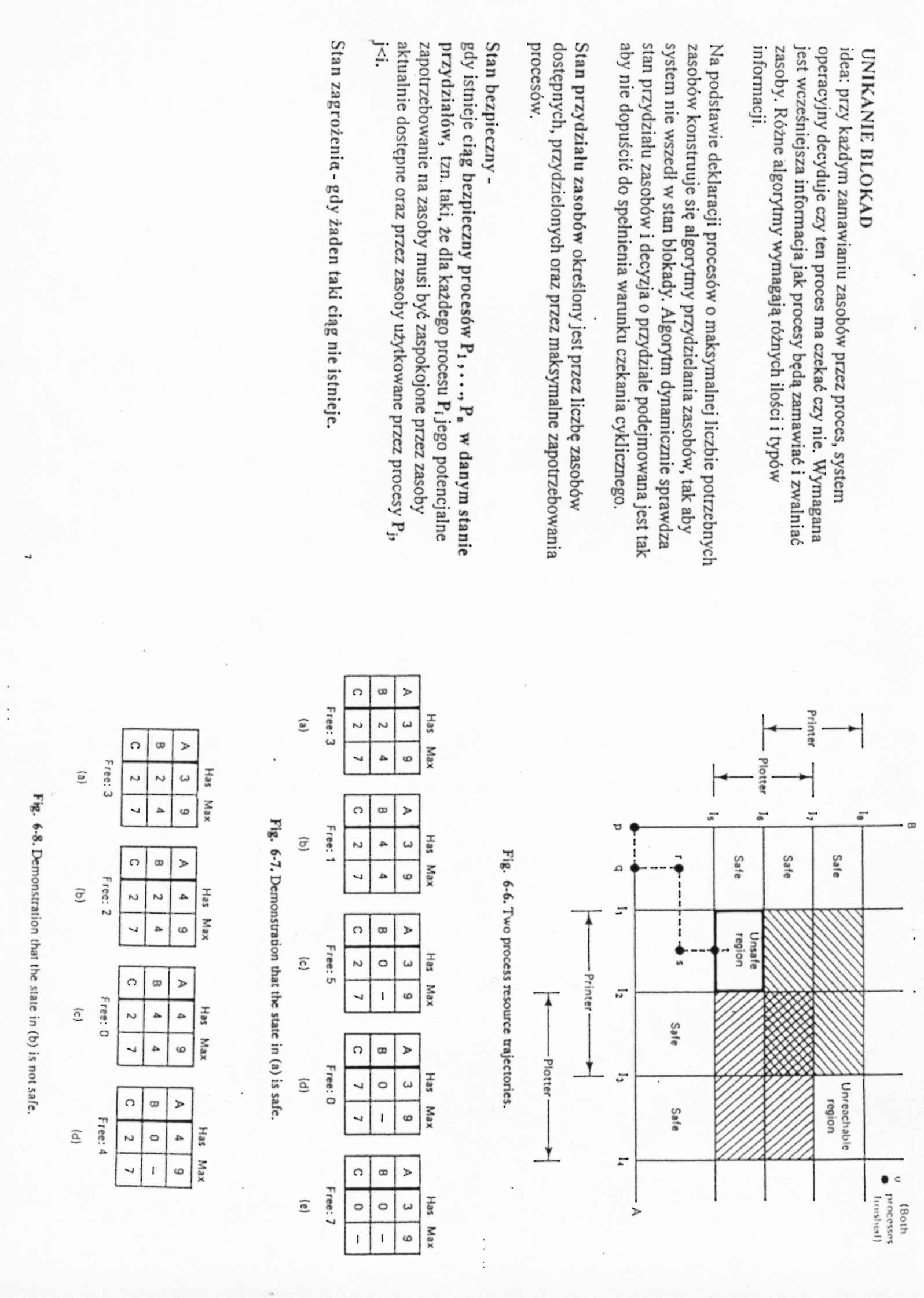
Fig. 6-6. Two process resource trajectories.
-Plot ter-►
Has Max
Has Ma*
Has Max
Has Max
Has Max

(a)
(b)
(c)
Id)
(e)
Fig. 6-7. Demonstrabon that the sute in (a) is safc.
Has Max
|
A |
3 |
9 |
|
B |
2 |
4 |
|
C |
2 |
7 |
Free: 3
Has Max
|
A |
4 |
9 |
|
B |
2 |
4 |
|
C |
2 |
7 |
Frcc: 2 (b)
Has Max
|
A |
4 |
9 |
|
B |
4 |
4 |
|
C |
2 |
7 |
Fret: 0 (c)
Has Max
|
A |
4 |
9 |
|
B |
0 |
- |
|
C |
2 |
7 |
(a)
Frec: 4
(d)
Fig. 6-8. Demonstration that the siatę in (b) is not .safe.
Wyszukiwarka
Podobne podstrony:
GĄSIENICA GABRYSIA POZNAJE KOLORY11 Z ogrodu dochodziło brzęczenie trzmiela Teodora, który zatrzymyw
Image169 licznik adresów umożliwiający wybieranie kolejnościowe (słowo adresowo zwiększane jest o 1
Ćwiczenia dla 5 6 latków ! (2) Nazwij obrazki. Przy każdym z nich zaznacz literę, na jaką kończą si
img102 Obejrzyj domki - kwadratowy i okrągły. Narysuj przy każdym jego mieszkańca. Pokoloruj
img107 Nazwij zwierzęta. Narysuj przy każdym z nich tyle kropek, ile ma ono nóg.
Rozwiązania zadań Do przekazania uczniom w trakcie gry - przy każdym zadaniu informacja o ilości moż
Picture�3 (4) W KRAJUNA ŚWIECIE „Niech Wasz patriotyzm potwierdza się przy każdym warsztacie pracy,
Scan0074 (12) I CA Wymowa c) Zasady pisowni i wymowy hiszpańskiej 2a. Oto kilka nazw krajów i miast.
IMGB Od obrazka do stówa Przy każdym rysunku zaczyna się linia, która dociera do diagramu. Wpisz do
karta pracyI Przy każdym wysokim domu rośnie jedno drzewo, a przy każdym małym domu jeden krzak. Ile
Zadanie 10. (3 punkty)Przy każdym utworze podaj nazwę środka stylistycznego często wykorzystywanego
więcej podobnych podstron