DSC00008 (18)
Technische Universitat Wrocław
Prof. Piotr Dudziński
Probleme der Allradantriebe von mobilen Baumaschinen

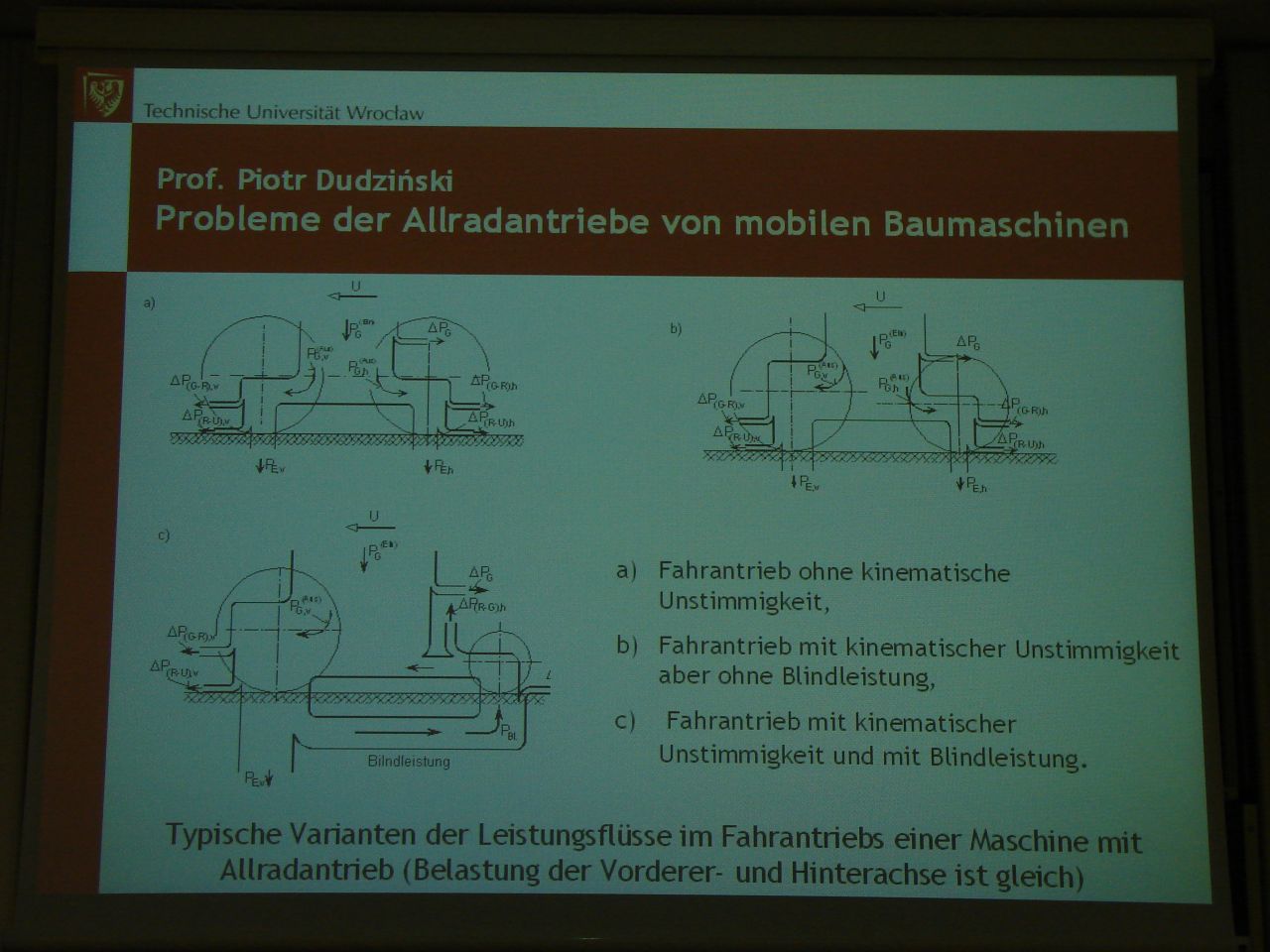
a) Fahrantrieb ohne kinematische Unstimmigkeit,
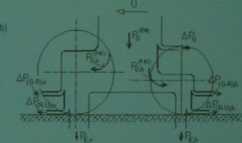
b) Fahrantrieb mit kinematischer Unstimmigkeit aber ohne Blindleistung,
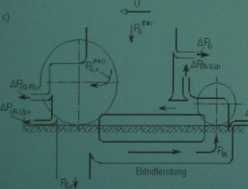
c) Fahrantrieb mit kinematischer Unstimmigkeit und mit Blindleistung.
Typische Varianten der Leistungsflusse im Fahrantriebs einer Maschine mit Allradantrieb (Belastung der Yorderer- und Hinterachse ist gleich)
Wyszukiwarka
Podobne podstrony:
DSC00006 (18) Technische Universitat Wrocław Prof. Piotr DudzińskiProbleme der Allradantriebe von mo
DSC00005 (16) Technische Universitat Wrocław Prof. Piotr DudzińskiProbleme der Allradantriebe von mo
DSC00010 (17) Technische Universitat Wrocław Prof. Piotr DudzińskiProbleme der Allradantriebe von mo
DSC00001 (7) Technische Universitat Wrocław Prof. Piotr DudzińskiProbleme der Allradantriebe von mob
DSC00003 (19) n M Technische Uniyęrsitat Wrocław Prof. Piotr DudzińskiProbleme der Allradantriebe vo
DSC00009 (19) Technische Uniyersitat Wrodaw Prof. Piotr DudzińskiProbleme der Allradantriebe von mob
DSC00004 (15) Technische Universitat Wrocław 1Probleme der Allradantriebe von mobilen Baumaschinen G
ydarzenia prof. Piotr Dudziński. Mogli oni ocenić, jak na tle zawodników z innych klubów wypadli
techniki sportowej / Stanisław Czyż, Piotr Oleśniewicz. - Wrocław : Akademia Wychowania Fizycznego,
Politechnika WrocławskaLiteratura XI 3 Piotr Wróblewski. Algorytmy: struktury danych i techniki
DSC00003 D. 5 E. 6 18. Do technik wspomagających drenu? złożeniowy nte należy. A
FIZYKA na Wydziale Podstawowych Problemów Techniki Politechniki Wrocławskiej INSTYTUT
Sbornik vedeckych prąci Vysoke skoly bańske - Technicke univerzity Ostrava Rada hornicko-geologicka
więcej podobnych podstron