DSC00310 (8)
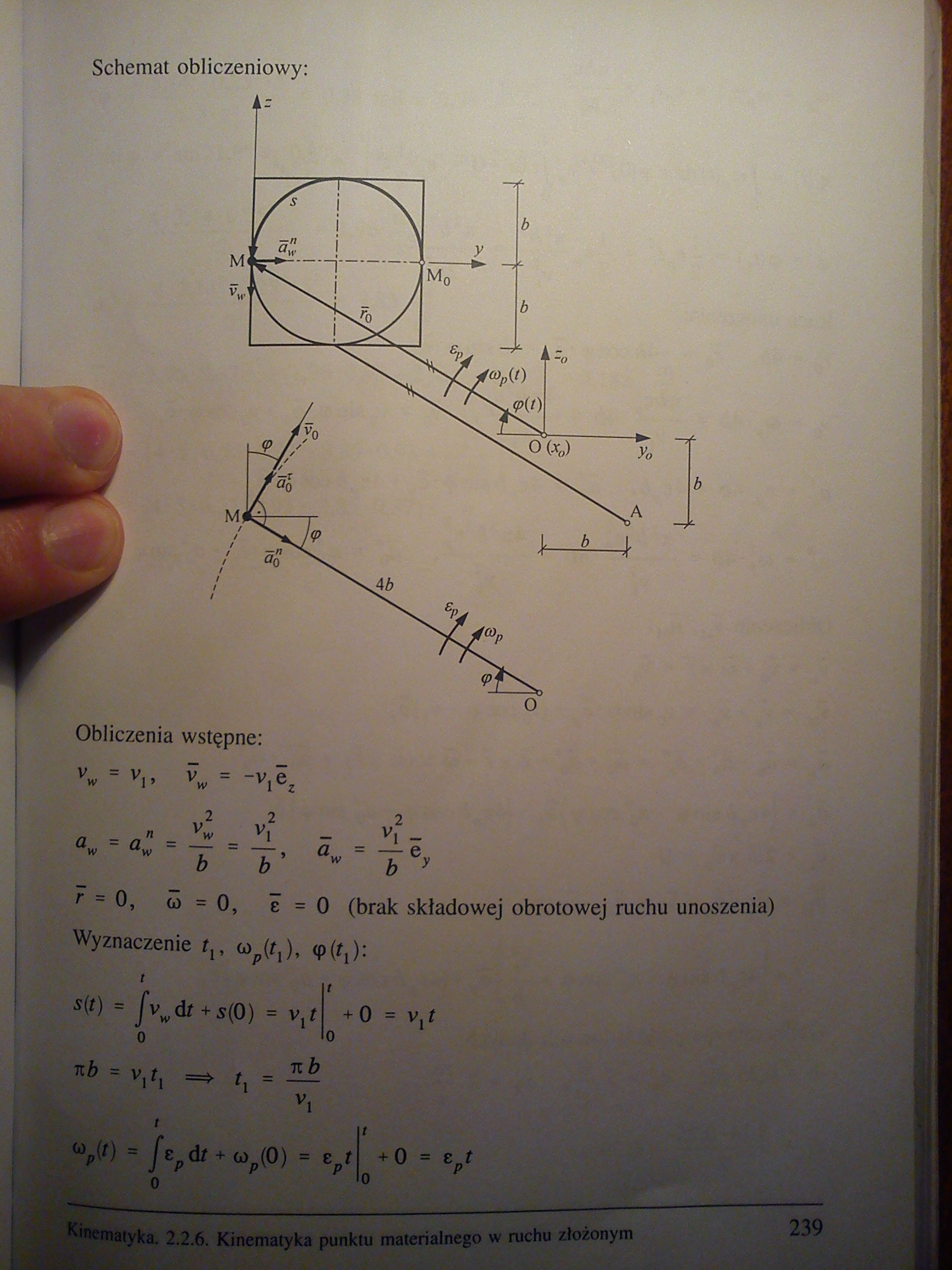
Schemat obliczeniowy:

|H = Vj, vw = -vtez

f = 0, w = 0, e ~ 0 (brak składowej obrotowej ruchu unoszenia) WWyznaczenie tv <op(r,),
s(t) - fvwdt + s(0) = vtr +0 = vxt
*b * yt tl =*. t =
V1
tiK)j a +wP(°)! BlIflBI I v
o 0 ;
259
Kinematyka. 2.2.6. Kinematyka punktu materialnego w ruchu złożonym
Wyszukiwarka
Podobne podstrony:
mechanika144 Rozwiązanie Schemat obliczeniowy: Punki materialny porusza się pod wpływem składowej po
mechanika37 Schemat obliczeniowy:M4— »---ł-M Składowe sił ukośnych: P. = 2P sin 30° =2P - = P, 1
skanuj0018 (97) Schemat obliczeniowy do modelu 11 I środek Schemat -środek domodeluH - fWf
skanuj0028 (98) Kontrola poprawności wyznaczonych reakcji — analiza układu sił. Schemat oblic
Slajd26 PRZYJĘCIE SCHEMATU OBLICZENIOWEGO Z PŁASZCZYZNY ŚCIANY
Slajd27 PRZYJĘCIE SCHEMATU OBLICZENIOWEGO SCHEMAT: W PŁASZCZYŹNIE ŚCIANY Określenie modelu obliczeni
Slajd4 PRZYJĘCIE SCHEMATU OBLICZENIOWEGO ^ DANE MATERIAŁOWE 1. Wytrzymałość na ści
Slajd5 PRZYJĘCIE SCHEMATU OBLICZENIOWEGO WARTOŚCI OBCIĄŻEŃ: 1. Obciążenie od stropu (w zależności od
41372 tab19 i 25Tabela 19 Schemat obliczeń do metody CUGW-u $50 - ... $ (s, p)
elk egzamin poprawa 10 16 02 2010ELK - Podstawy elektroniki - egzamin 1. Przekształć poniższy schema
więcej podobnych podstron