HPIM0838
nfr<j

\9lajmi
,1*1*1*

||ymiili'l| I)/}! , , , * iJl
Klinik iMhwiiiMiiwMwW pilM hhiJoii |P»|
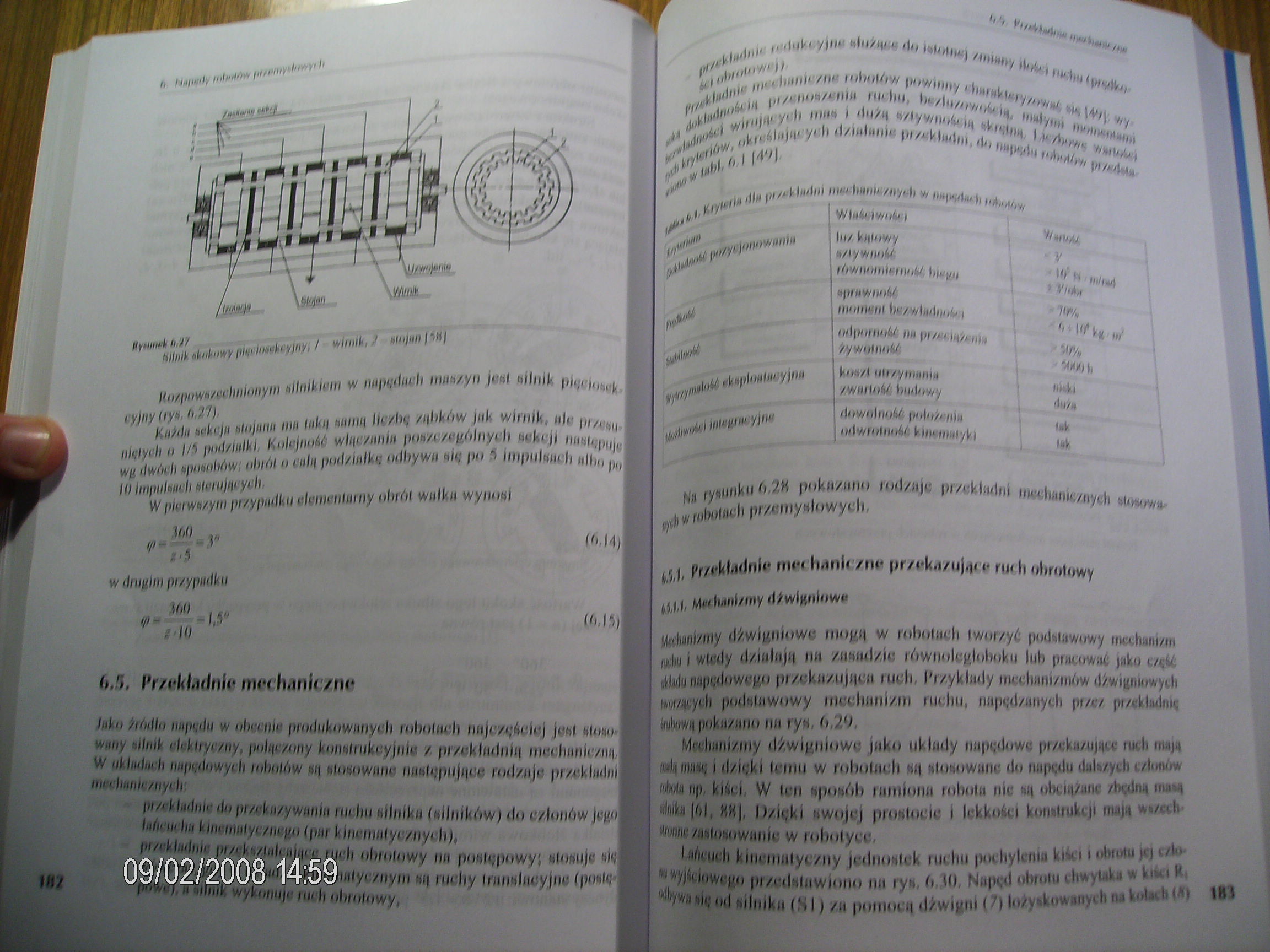
|ln/|iiiwi/uiiliiiloiiyin ullnitłlam w ni|$Mi maszyn Jut allnik piauiimakl tiyjny (ry», ft.27),
KiiWii Mkcln nlujniin lim liii iii iiiii ji wirnik, nic |MII-1 nld|ył!ll n 1 puil/lnlkl, KnlojwM wliic/nnln |)WZagÓlny«ll nckcjl limilfiiM Wg Jw|| tpoiiililiw; obrótII cnln pml/lnlk« fidByWB m« |I» i lnipulniu!li nllm |)ii|j III InipiMl "lomjiicycli,
W piorw^/.yiti pr/ypiidku wlciiicnuirny obrńl wtilkii wyiuml _|
li
w (Iruglni pr/ypnilku IM
(^14)1
W a • “|,§® l'|ll
|li,l5||
§f$i l'r/t*kladni(* mochsnlczni luko Mg iinpmlii w obwnil pniiliiknwnnyuli robotach nu)c/vkdoj jeiti wmiv illnlk dcklryc/ny, polgojwny knimlnikiiyjiiln /. pr/cklmlnln inochnnlc/ąH W iiklmliu li napojowych mbiil/iw »n itOMWanc mulqpiiji|co rml/njo pr/«kliulnl| mMlmnlv/nyvlr
pi A-kl«<lnic m pr/jjku/y wmilii ruchu nllnikn (nllnikńw) do wliinówjey® InrWiHihi klnomalyCitni||0 (par klninnnlyc/nych),

nhininwy im ponigpowyi iiinmijś iii iiiiyc/nym Hi) ruchy irniwliuiyjnc (pmwj ■aHHtlhMk wyki,mi|i' rut li nim,Iowy,
(„/tfMwliiir n .l.^1 yjnw dtl/HIM lin jmulMl mm,j 11,^1 la Piff0t0Wn)r
P/iW-i^ MWhtlMjlt) wliof/rw powinny rlmhw/m/i//; w IM m pimmmiu ruehu, Mu/irwnśćk mlmi mmmmi ^Nący«h im i Mn Mymwkk *Mne imam wuAi A(i^> owuśfąMjwili d/i#l#ni« p/MMm, i\Ii ,WW|,, ,mL..
\ą%
,*,!< <11# puMmini imlliwlmi/uli w wtmiMi \>hMtu
f yilifi'
j^lWluWlUpIlIKlwyjim
^inśliimiuyliw
|
Wluśelw ośrii |
Wwlnśt |
|
luz, kulowy |
►7 |
|
i/iywimM, |
< ll/s li Hiliwl |
|
r/mimmlmoU biegu |
tv/m |
|
aprmiiśl} |
■w, |
|
iiwmil Iw/mImIiihUi |
■ h i }lf l| In' |
|
plIppriWM im |M’/eii|j|Ź¥ril# |
fWk |
|
źywoinośś |
'W) li |
|
ku*/J uir/ymeme |
Mi |
|
/,w#riośC budowy |
Mi |
|
dowolność poloMu |
lih |
|
odwroiuośś kfneiiiiMf |
lek |
luhiuM fMnniwiwlii
Nu rymmkii 6,38 poku/uno rod/#jc piyMhuliil tnuhtnitwj/ih ultwowii* gil w rolwliml) praemyitowyeli,
iii, PrZflldadnlfi met hflflicznt pr/oku/u)#!** rur h nhrolowy Ul,l, Mm hunl/niy dźwigniowe
Ikliinl/iny dźwigniowe mogą w roholucli iwor/yd pod*iuw*rwy imhinm gdlj i w lody (l/iulttjtt im zumulde rdwnoleglohokii lub powownd jo ku c/etó dlidu napędowego pr/ckn/njiicn ruch, l’r/ykl#*ly fflechunlzmdw dźwigniowych pndulitwowy incclwnl/in mchu, impcd/uiiych pr/e/ pr/<kl*dme InJwwii piikii/imo nn ry#, (5,29.
Mcchunlziny dźwigniowe juko ukludy napędowe pr/eku/ujeec ruch nuj# ulu mm i d/Jeki leniu w roholneh w| Klonowane do nu pędu duluych fiflwhłw inlmU np, B W len upoudh rumfonu robolu nic si| obciu/anc /M## "“•# li |6|, Hk|, ll/iękl uwojej proulocie I lekkości korniruktji meju wi/ech-M/eiioMiwHnie w robotyce,
Ij/WucIi kineiiwtyc/ny Jednoutek ruchu pochyleniu kiści I ohrotil Jej «'*» •utryjiduwcgn pr/i-iluliiwiono nu ryu, 6,3,0, Nuped obrotu chwytek* » kiści Ri Hg nie ml „Uniku (SI j /u pomoc# dźwigni (7) ioŹyikOWflnych ni kotnh(#i Ul
Wyszukiwarka
Podobne podstrony:
17 fourrures N«( •lMI
HPIM0823 5. Slefowarw robolów przoTfyilowydi min, sokicj dokładności i optycznego żyroskopu możliwa
Linia bilów ROW SELECT ■ Lima wyli* wianza COLUMN SELECT L n»« wytio I I .Mi
* ft) M.KO/AKffUlC/ ///,v,V. wy/// C ŁtL • ^ n•%%%---- It mi tt - »t. Miltru t — wlariar lliirwll
□ n= 1000 [obr/min] Bn= 1200 [obr/min] «n= 1400 [obr/min] Dn= 1600 [obr/min] ■ n= 1800 [obr/min] ln=
□ n= 1000 [obr/min] «n= 1200 [obr/min] Bn= 1400 [obr/min] Dn= 1600 [obr/min] ■ n= 1800 [obr/min] nn=
□ n= 1000 [obr/min] Bn= 1200 [obr/min] «n= 1400 [obr/min] Dn= 1600 [obr/min] ■ n= 1800 [obr/min] Dn=
a 69tg *■« •« «[ ui( «* ^*1 Ui{ ku
Zdjęcie057(5) N«]btotnk
DSC00519 m N» IWBL Mi 1 vy itifctał f@z$yw pr&sćw # efBtat*?** ■BBBjllpg^ yvN, «mwv0 nH^Mritok r
a 69tg «[ ui( «* ^*1 Ui{ ku
83511 IMG245 jojsaJbw ^U0IU?3F/,n»
dsc08796 (3) 280 • 00NTININTAL ICHNIH.OOYi PUNDAMENTAL I
Maple Leaf?nce 6 / 4 aa=Mi fiJAlfflff; eeeŁJ u5S«rf)r.C 1M i = Ąxff /><”•/ = Mf r ^ "i
031136?6x1200 i tiiul.-.. mi Min mi i/f»tmń u/ć- oćDN/cy krt to moc iracona: .u AA^wCujarienG cGTa&
więcej podobnych podstron