HPIM0841
6. *up&t *ionłm prnmfdoayCb
fiftuiL MMaftęrńitśmpmj^ydkU^l Ohr»w #e*dl i ibwedk^ydk

pótoknytoww* pod tutum

O pr/jzw&mym muwiauu ciąp*
tlkknyim m/(h xm nJkjtu ber**#}*


Przekładnia patowa zębata ma wiele zalet, szczególnie przydatnych w pn, cy robolów, do najważniejszych zalicza «ę
- stałość przekazywania ruchu,
- zdolność durnienia drgań,
- wysoką sprawność qm99%,
- pracę z dużymi prędkościami, Pź lOOm/a i /r <40000 m/s,
- cicha praca,
- małe obciążenie oti, walów i lożytk,
- dokładność pozycjonowania, ok. 10,01 mm/1 m.
Przekładnia patowa umożliwia zmianę kierunku obrotów kó) czasem również ze zmiana charakteru ruchu - tabl. 6,3.
6,3.2, Przekładnie mechaniczne do zmiany ruchu obrotowego na postępowy
Do przekształcania mchu obrotowego na postępowy w robotach przemysłowych stosuje się przekładnie.
- śrubowe toczne,
- zębatkowe,
- pasowe z pasem zębatym, łańcuchowe.
Przekładnia śrubowa toczna składa się ze śruby i nakrętki, między którymi 1 toczne w cejJWlfantHBcia - rys. 6,33.
*—<6.31 , - - —--—. —... — - . . —
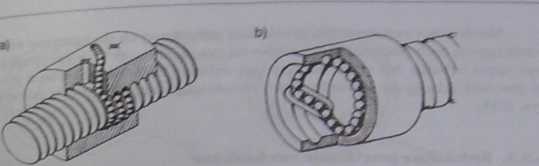
PmcUadou śrubowa toczna: a) z zewnętrznym obic&em elementów tocznych, bj z w* winnym obiegiem elementów tocznych (61]
Przekładnie śrubowe cechują się tym, że mogą przenosić znaczne obetą-śnią. mają dużą sztywność i dużą dokładność pozycjonowania, szczególnie aówczas, gdy między śrubą a nakrętką jest wytworzone napięcie wstępne.
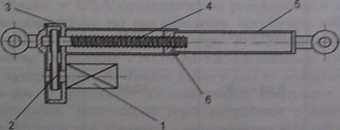
Na rysunku 6.34 pokazano konstrukcję wysuwnego ramienia robota o ki' tematyce równoległej, w którym silnik </) napędza śrubę toczną (4) przez prze' kładnię pasową (2). Silnik, przekładnia oraz śruba są łożyskowane w nieruchomym ramieniu (J). Śruba toczna obracając się, powoduje przesuwanie się nakrętki (6), mocowanej w wysuwnym ramieniu (5).
*>wngfc6.34t*v<-w- _
Konstrukcja wysuwnego ramienia robota o kinematyce równoległej (opis w tekście)
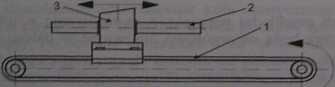
RV»unek 6.35
Przekładnia zębatkowa jako mechanizm zamiany ruchu obrotowego na postępowy; / — przekładnia pasowa. 2 — prowadnica, i — prowadnik
1
Wyszukiwarka
Podobne podstrony:
HPIM0820 s Stetow-onlo nrhntów pKomyslowyult Miałki panaMn
skanuj0011 (dwęd mmswrmm mmem * pomrknict apo/?e/ha pyc/e**,,. &k0iutAf%up) Jt- fioza/y &n
skanuj0016 r MMioMd LjtgMZ^lTtAYf: pi j 1 £OiiLTj U)Mf^^bjĄ^Up i p>ok^/h. Ł&^^bĄfd 1 WleM^^u&
skanuj0022 (221) I
skanuj0028 ŹUJENER&FTYK® EKOLOI C-Zl^lF) Wykip-C 13;. "• 5? «• outotrof y ^up *
skanuj0029 (27) 128 E.Up**a • rodzaj uprawianych buraków (np. plenny, wysokocukrowy). •
skanuj0031 (68) &F aiir + -ry y"- E ę oHr V* d "OSE / 5^ 3Et fin.
f1 5 7* WallStreetWeb by BulletProof File Portfolios Configure Free Sign Up Help Portfoliol AMA
f12 1 LAN DIAL-UP INTERNET DIRECT ISDN 128K - linę Tl* 1.4 MBS Frame*
f8 6 Ą*- Untitled - Win95 Controls App File Help Progress Bar Control Trackbar Control: □aa Up-Down
f8 7 □aa Trackbar Control: Ą*- Untitled - Win95 Controls App File Help Progress Bar ControlJ- Up-Dow
fig11 First thread gains ownership. First thread gives up ownership to second thread. Second th
flaga up u nia cłłśof
ghost016 Backup Wizard Tb* Norton Ghoil Becku? Waeid rteps you ftuough Ib* łask ol bactrig up you co
Gordo Remora Next up on Gordo: Pecple who believe in conspiracy thecries. Are they nuts or just
gr I b PRZYWRY Lublin 2010 Zaliczenie testowe IH rok Wydz.Med.Wet UP Imię Nazwisko grupa Postacią i
więcej podobnych podstron