HPIM0820
s Stetow-onlo nrhntów pKomyslowyult
|
Miałki panaMn | | ||
|
1. . lllóM |K\)W«(U^| ( pMyWM J |
wmmmmpmmmmM ;■ [LMaimwupttk | aktywna |
[ liiil | | prowflri/tyifil J |
|
Ooliikfjii lolooplys-iim - MMrlJIM •, otMięt aiatalu |
Prow<Ml/*ult ImHtKoyjoe |
U Napadła wltlualnn w iwItgutunUrs loKnllaoajii] «ijigyiaeiawa oplyoznn =podutiwona - ultradźwiękową laiorowa • ■ Zyroakopown |
W mstodsle Jhtoui>tyc*iwj wi stosowano fotokomórki lub fotodiody umieszczone w inochtmi/niic kolii kierunku jazdy (kola skrtjtuoyo), ronjAnliujy im milionie światła odbitego od aiimiilownacj linii. IJkliul royulncjl kierunku jo/dy dąży do tego, aby mulenie oświetlenia obu fotodiod było zawsze jednakowe, on oznacza prowadzenie wózka wzdłuż, namalowanej linii.
Istotą metody IMtoiui, która Jest rodzajem metody oplye/nej jest pobudzenie nltralloletem cząstek znt(|di(|i|eyeh Nlę na pasku umieszczonym na po< wierzchni podłogi, które emlti(|i| światło o widmie niespotykanym w otoczeniu, (ilowicn skuiu\je za pośrednictwem oscyli\|i|cych lusterek wyznaczomi drogi; sterowaniu, przeknzi(ji|c dane do mikroprocesora, który po zinterpretowaniu natlenia światła decydi(jo o tym, czy pojazd zbacza z drogi (ciemniej), czy te) zni(jdt(je się w centrum, dokładnie nad pasem wyznacziyitcym drogę,
W metod:le wykomstijticej detekcję inetolii pojazd Jest wyposażony w detektory metalu i podąża zn stnlowii tońmi) ułożony na lub pod podłoga hall, Typowy system sterowaniu wymaga dwóch zestawów sensorów, po pięó sensorów każdy, Umieszczone Su one nu obu koóonch wózka (tyl I przód). Trzy sensory centralne umożliwiała utrzymywanie się w środku drogi, u dwa pozostałe po-konywunie krzywizny tom.
techniki aktywne, Stosowanym w praktyce przemysłowej sposobem transportu jest prowadzenie indukcyjne. Jest to technika aktywnego śledzenia drogi, która wymaga użycia przewodu prowadzącego, zasilanego prądom elektrycznym o niskim napięciu i należeniu oruz wysokiej częstotliwości. Autonomiczne roboty mobilne pnnnizujii się wówczas torami wyznaczonymi przez przewody elektryczne zagłębione pod podłoga bali o przebiegu odzwierciedlającym kształt poti/chnej sieci dróg iiausporiowych, Przewód len po zasileniu napięciem wytwarza zmienne pile elektromagnetyczne, indukt(jt|cc napięcia w cewkach wózku, Ukłi
nH
Sysunok .1.111
Toolmlki prowadzenia lulooomloinysll robotów inohllnyoh
lęży do tego, aby napięcia w obydwa cew-pujo wówczas, gdy przewód prowadzany
^Irlflgn dokładnie w środku między nówkami. tJlrtml fitu# K;'1" & "hy MW,M lon «■» |wymnó, ppJSa^i
nadanym tonto, %^C!l(nS
r \\tyiiilualoai! leolmlkl prowadzenia anionomlu/nyct, r "''"‘li (Upewniała niestały dokładnego pozycjonowania Na»lii 'Nin iplti np- pode/na znlr/ymywanlii w pobliżu miejsc * S>'"W | |, obróbkowych w celu przekazaniu lub pobraniu (nnioriniA^ 5R!1' ,||(li iitnleszezn się w związku z tym Rpeojnliie t.minuznlkpt J!' pilili Impulsów), któro ulniwltda pojazdowi okrallenio 'W!, JJJęJI I po porównaniu z zapiimlęlniia | pamięci kompunj,vJ^^|2 grania odpowiedniej korekty położeniu, Innym MitSJ^Jś /„J I «.«llu* drogi (w odpowlednleb punktach) znaków loronmvy,i|| ' #l"%.
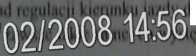
' obu stronach linii prowmlznuoj z bocznych kresek (odclioti/,.^ ,|lM'0,v'"'ych Lutyni od głównej linii wyznncząlącej lor racliai, Pojazdtoini fWiii 1,11,1,my kod tych kresek (rys, 5.13). Illlc|pttiqje
| Sonika rucluirl 1 PsNPskN"l*Mt«W»
-1 u tżirwnoMlirimmtwn
-----» II
KtcnmoS ruohu pogudu I w. SoblkiiwlHi J) W |1 tznacmkUtal
Mg?1
Klrmmnlt roolui pojozrlu n , n i r o 0 c) totka aiclw J~]_f| J™8*'1*
inr
Kltmtnok ruolm poloztla . “. “
litusk 1,11
ZiMe/ntkl bliarno tai (lindze robotni u) zniioznlk punktu zatnyinnnfa, bi Ul imit, (i,, i u polożenln
Miojnco dokltidnegn ziilrzymiinln się pojazdu jest zwykle długa metalowi) plylj na podłodze, (Idy zbliża się do punktu stopu, \vlqc/n się detekiot metalu, zwalnia I po osiągnięciu końca płyty zatrzymuje się, Dokładność' zatrzymami wynosi od 0,75 mm do 0,25 mm,
Nawigacja wirtualna to rodzij techniki sterowania bez ścieżki pro-wadzttcej. W pamięci procesora pukludtrwego pojazdu jem zapamtęiana dwu-wymiarowti mnpit bitowa Świnia zewnętr/m-ga, i/n. hali fllbiycznęj z zo/naczo-pl wszystkimi stałymi obiektianl (przeszkodami), Komputer poianlu gcncniK ||n mchu od punktu startowego do celu, a następnie cc-edlug alej prawi-ilil wózek, sterując inecbnnlzmimri kierowania I napędu. Ntzai jazdy ko-ilw/ne jest sprawdzanie zgodności rzeezywlslogo toni ntchu i wygom a-syn, i także wykrywanie niepr/ewidzianych przNJkód (ludil, pnobtttaów) HI
Wyszukiwarka
Podobne podstrony:
185 Konwencja heroic fantasy w grach fabularnych gatunkowej, lecz unikała rozwiązań miałkich,
HPIM0800 i •ML a«b*wcS Iwiumigmi BBpKBBC i=ocos0, y=vsin0 i po przekształceniu SdbaBał otaaaea
HPIM0801 ■ n 4. Wprowadzenie do kinematyki robotów Jak można zauważyć, równanie to ma postać równani
HPIM0802 5.1. Zadania układów sterowania 5. Sterowanie robolów
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0804 fi wult(dU tui ultilHitoi utuliut vmuI(Uv I Mulitiąl u.M(if’uiit >i
HPIM0805 i ‘MuiowauiM ml ml o w pnwiiyilnwyrli Pr/oiirttrt iuhiHVii robolu kiuio/Jnńsklcgo 0 dwóch o
HPIM0806 5. Stwtiwjn* robotów prnmytlowyrh Interpolacja typu Splinc umożliwia uzyskanie bardzo gładk
HPIM0807 S ShMtMOHH* lohfttltW S ShMtMOHH* lohfttltW i wwśnioj ustalonych grup nazw. Większość ste
HPIM0808 5. Sterowanie robotów piwnystowych Roboty z układami o stałym programie (tzw. pick and plac
HPIM0809 rl •olKlł* ł>llinlłt ft IMtlllll/1 lilMyi ll tfyMtyff/Hfyi), tAH
HPIM0810 wMMh r / ..V -, » 1 MMfl WN8**AflH j i 3»JRMM jjfrjMl IP>**
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0812 5. Sterowanie robolów przemysłowych 5. Sterowanie robolów przemysłowych łącznika K3 - linia
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0815 / SHttowmi* fdtoóm pr/*myshwY(ii mięci użytkownika W szczegół noki moduły pamięci operacyjn
HPIM0816 • 9lHWHlk !PtnvMjiwlł rw (13) tlały do sfcttrHHtiM ratjlitiłrii w pm/ę., Wił (tiM roboto. f
więcej podobnych podstron