HPIM0856
Wuplujm,
fUk
łUikitłiyWMtllH ft//y fiH IłfyiiilJ Ihih.ImniHt’/
I yfrowp, HH kwapiiu m */ ytu wyłu*rzysłaiuu ftMIterd m*j4f statystyki, MMl||Pp dmiyiUt g§P|j Wfeww^;^ J* i opracowanego H ffl ptnUutwk oprogramowały ^
hhifilt/rti ihliHyhftrtMyi /tW), m W^l^^WbnUt eztuf?*/
sieci neuronowych,
Mttifjfly uptyf/n*
W optycznych r<//fKf/«tfj^ ych pyfcorzyetujn się zarówno
n i nletpójne, H B pilRHpjjfj/ ^ <>^; / układów soczewek gfj^., wych, tylin<lry^/«yt1f I mtets/wnytfi )cdną / /rurl/ni jest mehwla ^
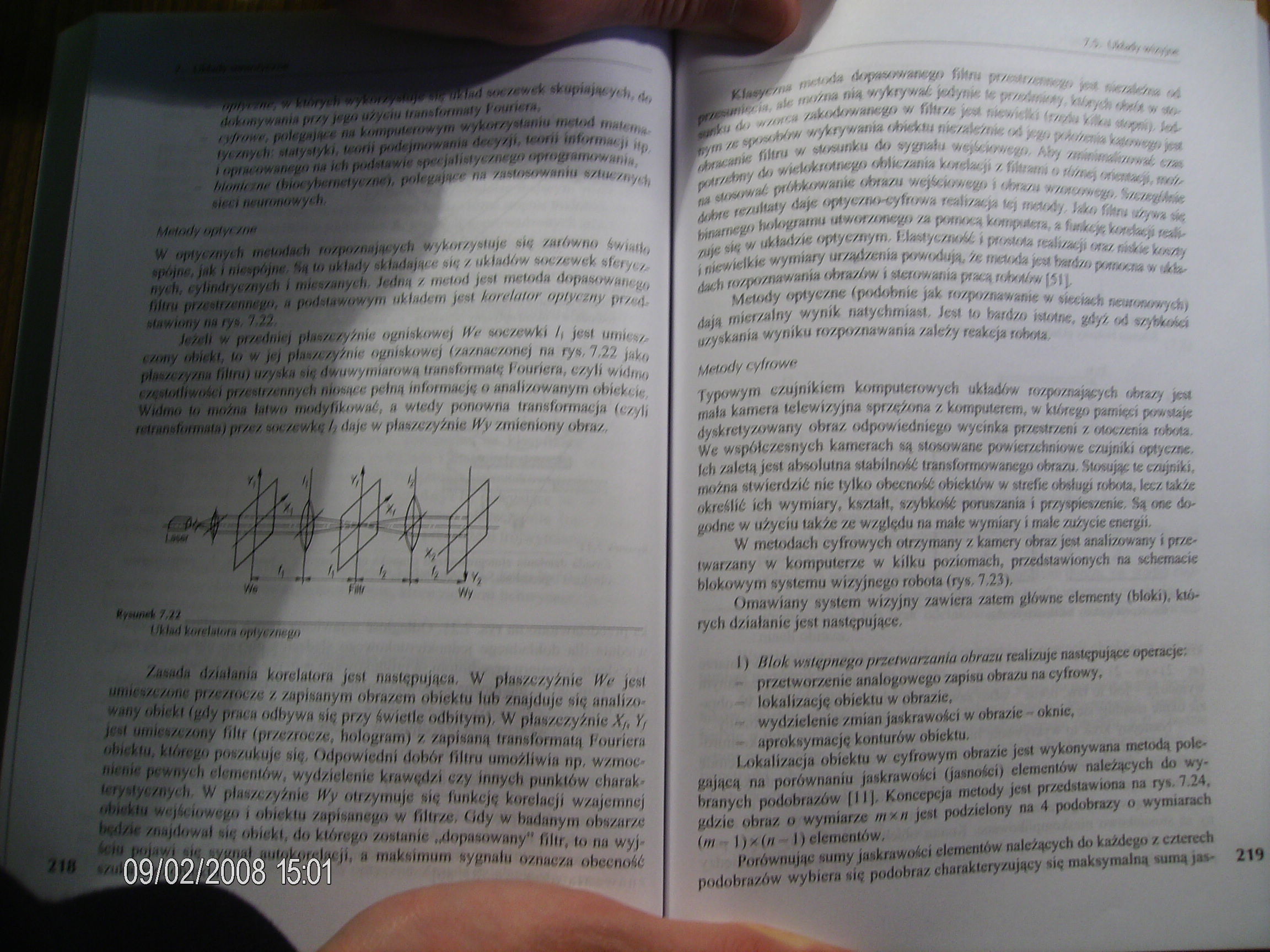
filtru przestrzennego# $ potUlawowytn wkładem jest ko wtul nr optyczny tu/,'.' anwiony nu ryt, 7,22,
Mili w pi/talnk\ iłHmjyźm og/iisJutwej We soczewki l\ jest tnlw i omy obiekt, to w jej phwzezyżnie ogniskowe) (zaznaczonej nu ryt, 7,22 Jgjjj pbw/e/y/nn (Wiru) uzysku się dwuwymiarową transformatę Louricra, czyli wuu, * łyęst//tffwości przeto zet mych niosące pełną informację o unuh/owunym obleją,! Wtdmo In nut/un lafwd nuAyfWtowuć, u wtedy ponowna Irunuformueju (fizyU fUrBnt^tfiwUh) przez :'»»// y/i<; /j <!/i)łt w płaszczyźnie Wy zmieniony obraz,
Cmm
m
/
Uf mimi> 1,%%
i lltlsd lurffiSłors mwjffifWf//)
Zieede działaniu korelatora Jest następująca, W nłaazc/yźnle We jest umfcmmie ptze/mze z zapisanym obmm obiektu lub znajduje się analizowany obiekt (gdy proca odbywa *»u; przy świetle odbitym), W płaszczyźnie Xh Yt Jwł umics/c/otiy filtr (przezrocze, hologram) z zapisaną transformatą Pouricra obiektu, ki/ncgo poszukuje się, Odpowiedni dobór filtru umożliwia np, wzmoc-ftlenie I eny* | itofilentów, wydzielenie krawędzi ezy Innych punktów charaktery styc/nych, W płaszczyźnie Wy otrzymuje ale ftmkcję korelacji wzajemnej Mngl w^jścu/wego i obiektu zapisanego w filtrze, Ody w badanym obszarze znajdował sic obiekt, do którego /imanie dopasowany” filtr, to na wyj*
a maksimum sygnału obecność
M _
■
WguTiriytfmzM'#*#* rmm przzmrzemą, z * **zA#m ,4 Lwźmi om wykrywać jedyw* te y/rAmty, ztizryM >>,>> w Wtr /&* Amm*-ąUl W flHzz* yeti ftW/e ltri Yto* Uzi wykrywania ttonńm w/ak/tm >A py, yM/zum Uatm*#, p* bratanie filtru w stosunku *U* uy&uttt Aby zmm4k/z»mt v>. :
jy^r/etmy <k; wtek#kw#tncgr# i*Xslzmua biuńmp z fiteanN o rlfzną •Kemeśy, md, w <&mwnft pĘlłzkzzouuui obrazo wrsfoiuwąui i tbnzo WMzwift, SzKZKzdĄm dobre rtzrimy daje optyczrun^fniwa readrzacja tej hko (bot 'r/zjm m tńnmcpi Mąirmo ulwor/zmyji za pou**a komputera^ a U*totp brr&pi zufc w w układzie optycznym, MMymtM i poau/a mbppt tnz.i.>** luwty \ niewielkie wymiary urządzenia puwoćop^ '/t nutu A* pa bmó/o prm/m », Wu-dacb rozprr/nawania obruz/rw i ^mrzzmiu prueą ułr*Ąlwlfi\\
MeUnty optyczne (podobnie jak rirzjpozmwAtuK w sieciach rmmmrmzMi deju mierzalny wynik natychmiast, Jest to bardzo isuwne, gdyż ud ezybkutei uzyskania wyniku rozpoznawania zależy reakcja robota
Metody cyfrowe
Typowym czujnikiem lu/rnputerowych uklad(rw rozpoznających Obrazy pa mała kamera telewizyjna sprzężona z lunnputercm, w którego pamięci pimaap dyskretyzowany obraz odpowiedniego wycinka przestrzeni z otoczenia robota We współczesnych kamerach są stosowane pow/erzchniowe czajniki optyczne. Ich zaletą jest absolutna stabilność transformowanego obrazu, Stosując te czujruki, nurżna stwierdzić nie tylko obecność obiektów w strefie obsługi robota, lecz także określić Ich wymiary, kształt, szybkość poruszania i przyspieszenie, Są. one do* godne w użyciu także ze względu na małe wymiary i mele zużycie energii,
W metodach cyfrowych otrzymany z kamery obraz jest analizowany i prze* twarzany w komputerze w kilku poziomach, przedstawionych na schemacie blokowym systemu wizyjnego robola (rys, 7,23),
Omawiany system wizyjny zawiera zatem główne elementy (bloki), których działanie jest następujące,
I) Blok WHUfpne%n przetwarzania obrazu realizuje następujące operacje;
- przetworzenie analogowego zapisu obrazu na cyfrowy, lokalizację obiektu w obrazie, wydzielenie zmian jaskrawości w obrazie - oknie,
*■ aproksymację konturów obiektu,
Lokalizacja obiektu w cyfrowym obrazie jest wykonywana metodą polegającą na porównaniu Jaskrawości (jasności) elementów należących do wybranych podobrazów (II], Koncepcja metody jest przedstawiona na rys, 7.24. gdzie obraz o wymiarze m*n jest podzielony na 4 podobrazy o wymiarach (m „ |) # (n - I) elementów.
Porównując sumy jaskrawości elementów należących do każdego z czterech uulobrazów wybiera się podobraz charakteryzujący się maksymalną sumą jas-
V Utąyr/h-
219
Wyszukiwarka
Podobne podstrony:
HPIM0809 rl •olKlł* ł>llinlłt ft IMtlllll/1 lilMyi ll tfyMtyff/Hfyi), tAH
HPIM0835 ft ł‘<M
Scannen0025 LiefdeHarten - WERKWIJZE ICnłphet tO zę><*<ć* pjtroco u t cp het i^£fjfvrn w hu
skanuj0009 nOi&rotn.fnUtj /I4ACA* (fj u mk ^flCy Ctuf g </>£ k uftOMe od
skanuj0010 O ^U^UC ^ LvvJ^Ay ^uCXOl> ft? obi^^ZCt-c^- C_- -tQjla^^Z) ► v^ ^ ^vtx^ir<wCVi_rfj t
skanuj0010 (143) mhsM, .Id -łioiw
skanuj0013 (161) JrtM 1 Qjft rgroJŁsQift» 0^>XłHfoc>C
skanuj0015 (283) r ć}0?%6 /O n c^i .s " e"- aIZM-Ao‘ fc*B Y Aooy*/#6a* m
skanuj0015 (31) 2 Fe’1 + H2S — 2 Fe2’ + S" + 2 FT Fe3 + e 7i Fe2 2 ll2S 2 S
skanuj0017 (334) vkp
skanuj0017 (42) c= 4 & + ^ ^cnaU—-fe<. ryi^-- Hu/ft V /) r \rtf b& kfcd
więcej podobnych podstron