2740389872
przemysłowych i SN maszyn produkcyjnych na przełomie XX i XXI w. spowodowało powstanie w pełni zautomatyzowanych fabryk, takich jak ta kierowana przez japońską firmę FANUC.
Inne roboty przemysłowe znalazły zastosowanie w wielu dziedzinach niezwiązanych z produkcją wliczając rolnictwo. Fragment Rys. 1-3 obramowany na czerwono przedstawia typową budowę robotów przemysłowych. Robot po lewej jest programowany za pomocą tzw. uczenia bezpośredniego. Oznacza to, że na początku, w trybie „TEACH“, prowadzony jest przez programistę wzdłuż pożądanej ścieżki, która jest rejestrowana w systemie sterowania. Następnie, w wyniku aktywacji nagranego programu, robot w pętli powtarza nauczoną ścieżkę w trybie „REPEAT“. Taki robot może być używany głównie podczas ciągłego spawania wzdłuż wymaganej ścieżki, lub do malowania farbą czy powłoką ochronną. Robot po prawej jest programowany przy pomocy panelu sterującego, gdzie programista zawsze prowadzi robota do pożądanych punktów. Po zapamiętaniu punktów, robot wykonuje prace pomiędzy każdym z nich, lub dokładnie w ich miejscu w oparciu o wcześniej wydane polecenia. Taki robot jest bardzo przydatny np. do zgrzewania punktowego karoserii samochodów w fabrykach samochodowych.

Rys. 1-2: Uczenie bezpośrednie robota przemysłowego
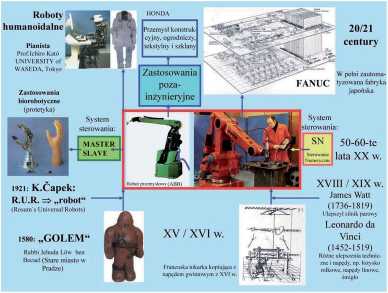
Rys. 1-3: Schemat rozwoju maszyn przemysłowych i robotów
Zastosowania biorobotyczne (protetyczne), sterowane systemami MASTER-SLAVE, ewentualnie poprzez sygnały z układu nerwowego EMG (Elektromiografia), rozwinęły się jako pewna gałąź poboczna sterowania SN. Jednakże główny rozwój w robotyce podąża najbardziej fantastyczną ścieżką jaką jest rozwój mobilnych, chodzących i humanoidalnych robotów (np. HONDA). Urządzenia te wykazują uderzające podobieństwo do fikcyjnych Golemów i nawet uczenie bezpośrednie robotów przemysłowych, które są poruszane przez operatora i które zapamiętują ten
Wyszukiwarka
Podobne podstrony:
Logistyka - nauka Robert MAREK*PRZEMIANY W PORTACH MORSKICH UNII EUROPEJSKIEJ NA PRZEŁOMIE XX I XXI
31. Świętochowska Urszula : Edukacja pozaszkolna w Polsce na przełomie XX i XXI wi
mu zagrożeń militarnych i niemilitarnych na przełomie XX i XXI wieku spowodowały, iż pojawiły się pr
Chełm: Przeobrażenia w języku , kulturze i edukacji na przełomie XX i XXI wieku (PWSZ w Chełmie) Pio
150 Angelika Kaczmarczyk Brzezin W., Ogólna teoria rachunkowości na przełomie XX i XXI w., ..Zeszyty
ŚWIAT NA PRZEŁOMIE XX I XXI WIEKU
WSTĘP Na przełomie XX i XXI wieku telefonia komórkowa przestała być luksusem dostępnym jedynie dla
3) „Miasto w sztuce - sztuka miasta. Analiza kulturowa przestrzeni miejskich na przełomie XX i XXI w
BEZPIECZEŃSTWO PAŃSTWA A ZAGROŻENIE TERRORYZMEM TERRORYZM NA PRZEŁOMIE XX i XXI WIEKU
19 10 W do 1 MW [235]. W ostatnich dekadach na przełomie XX i XXI w. opracowano i wprowadzono na ryn
Wstęp Przełom XX i XXI stulecia charakteryzuje się gwałtownymi przemianami. Zachodzą one na całym
WSTĘP Przełom XX i XXI wieku jest uważany za początek ery ekologicznej. Obecnie najważniejszym wyzwa
121. O obronie militarnej Polski przełomu XX-XXI wieku / Józef Marczak, Jacek Pawł
więcej podobnych podstron