8495020572
X
£Ą RT 1ooIBox2 - Project_Name (Online) - [Free piane limit parameter l:Robot_Name (Online)] J
ftJ WorkSpace View Online Parameter Window Help
□ % s mT• (We ss
iftliHl X maife ISMBBl
Robot_Name —TIBIfBlBlla.
r.: ii:
El Project Name ĆS 3D Montor H Q Robot_Name ©S) Offtne Ś kWi Onlne
i m RV^IFLM Q 3 Operation panel 1+Ei Program m SQ Orect li @ Spine Ę @1 Parameter --Se Parameter kt ©Cl Movement parameter tr Mobon Irnt El Jog (Ś-E Hand E. Weight and see El Tool
B User-defined area E Free piane Imit E Home posfcion E: Robot additiona! axrs łr J Collson detecoon E Warm-up operation E Movement B Work coordnate ii E'l Force control i E Colisdn avoidance : E Safety
h-)Ł Program parameter ©E i 5gnal parameter © (r i Communcaton parameter © E PLC cooperation parameter fi M Monitor + Sl Mantenance © IB Board © l» Backup ©{fil Tool
+ 23 MELFA-3D Vrsion + W I/O Simulator

o OFF
ON(Inside)
Płaszczyzna włączona. Punkt (0,0,0) znajduje się w strefie bezpiecznej
Coor3nat^ystem^SFC5C5^
)
ON(Outsde)
o World
Base
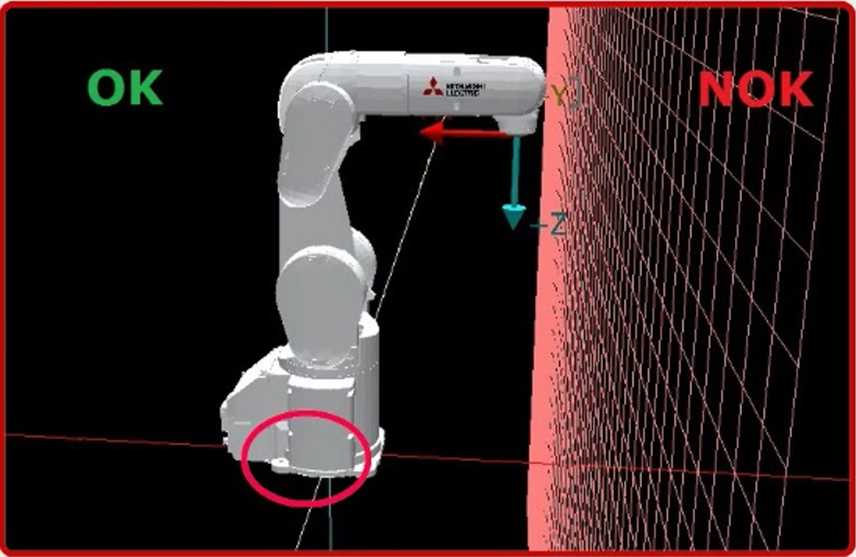

Aktywacja i wskazanie stref: bezpiecznej i zabronionej

3.4 Collision Detection
3.5 Free Piane Limit
3.6 User Defined Area
♦ MITSUBISHI jrm ELECTRIC
Chanat t for tht Btrut
Wyszukiwarka
Podobne podstrony:
KI IoolBox2 - Project_Name (Simulation) - [Weight and size parameter l:Robot_Name (Online)J WorkSpac
f10 7 Options Environment ! Project] Edilor
- Graphic Design Poster project (10%) • Online Blog 15% of finał grade (combined) Finał Grade in Des
m/f ~¥ Fans et filmsd’łiorreur en haut de 1’affiche Exposition & la media-theque. projections,
en o New JavaCreate a Java Project Enter a project name. Project name: Contents ® Create new project
HfflBaMaiia Name your project Project Name
seam project wizard1 #= New Seam ProjectSeam Web Project Create standalone Seam Web Project Project
sticky footer navbar Project name Homo About Contact Oopdown -Sticky footer with fixed navbar Pin a
jumbotron narrow Project name Homo About CootactJumbotron heading Cras justo odio. dapibus ac facili
justified nav Project name Homo
Due datę: DatęCreative Brief Project name: Warne Objective: What are you trying to accomplish? Strat
, IWJJŁMMO, VMj-70&łŁsjasSgaueś * *ła<5 **««rtacjl archltewonoioznej bujyriu nr 1
jBrojrrt Free ebooks - Project Gutenberg jBrojrrt Free ebooks - Project Gutenberg l£>utrnbtrt) se
starter template Project name Homo About ContactBootstrap starter template Use this document as
an EIT RawMaterials projectOPEN DAY Online Event 27th November 2020 MOBI-US is an EIT RawMaterials f
navbar fixed Project name Homo Aboot Contact Oopdown » Oołautt State top Focod topNavbar example Thi
więcej podobnych podstron