8495020582
EH MELSOFT GX Works3 ...ogramy\Własne\program1_bazowanie_Scale home.gx3 - [ 1(U1]:FX5-40SSC-S Module Parameter J • Project Edit
i D 0 R a «
Vi(
Find/Replace Convert :
L3 MELSOFT Simple Motion Module Setting Function ...ogramy\Własne\program1_bazowanie_Scale home.gx3 - [01:FX5-40SSC-S[]-Parameter] i Project Edit View Online Window Help

jy 01:FX5-40SSC-S(]-Parameter X
□
Es
|[| Ftxed Scan |[| Event |f| Standby f f| No Execution Type ib Unregistered Program FB/FUN (Js La bel Device
B Device Comment fci Device Memory te Device Initial Value Parameter
^■9 System Parameter t*4 FX5UCPU
CPU Parameter fri Module Parameter [£ Memory Card Parameter |£ł Module Information |.i 1[U1]:FX5-40SSC-S & Module Parameter
Simple Motion Module Set
f r, Remote Password
Conn..
T> Watc...
T> Watc...
Navigation
Project
I-? -J -i
H l i 01:FX5-40SSC-S H System Setting
l]|] System Configuration . Mark Detection
Parameter
& Servo Parameter Positioning Data ^ Axis *1 Positioning Data ^ Axis #2 Positioning Data ^ Axis $3 Positioning Data Axis #4 Positioning Data nfc Błock Start Data
□ Synchronous Control Paramet
□ Cam Data
El Simple Motion Monitor H [5 Servo Amplifier Operation f\M» Digital Oscilloscope
M 01:FX5-40SSC-S[)-System Config.
I 01:FX5-40SSC-S[]-Servo parameter ^ 01:FX5-40SSC-S[]-Axis *1 Positio..
Display Fil ter Display AH
Item
Axis “I
Axjs -2
Set the loeic of external input sienal (external imand/s
Pr.150 Input terminal loeic
selection command/switchine) for simple motion module.
Pr.l51:Manual pulse
generator/Inaemental Sync. ENC 0:Negabve Logic mput logie selection
Set accordine to the machinę and applicable motor when sys...
3:pulse 3:pulse
4194304 pulse 131072 pulse
- Basic parameters 1
Pr.l:Unit setbng
Pr.2:No. of pulses per rotabon
Pr.3:Movement amount per
rotabon
Pr.4:Umt magnificabon Pr. 7:Bias speed at start
- Basic parameters 2
Pr.8:Speed lim it value Pr.9:Accelerabon bme 0 Pr. 10:Decelerabon bme 0 E Detailed parameters 1 Pr. ll:Baddash compensabon amount
5000 pulse 10000 pulse
l:xl Times l:xl Times
0 pułse/s 0 pułse/s
Set accordine to the machinę and applicable motor when sys...
flOOOOOO pułsefc H 1000000 puise/s
100 ms 100 ms
100 ms 100 ms
Set accordine to the system confieuration when the system i...
0 pulse 0 pulse

Compute Basic Parameters 1
Output
ŚJfrError 1 Warning | ^Information 0>Chd
Pr.8:Speed limit vabe
Set the maximum speed durng positioning, HPR, and speed/torque operabons.
Setbng Rangę 1 to 1000000000 pułse/s
Spe«d
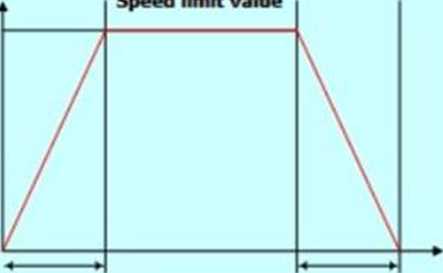
Decełeraboo bme 0
Tme
Acceierabon bme 0

|
| Insert | |
I |
1=1 Output
Progress
Host-192.168.3.250
Wyszukiwarka
Podobne podstrony:
MELSOFT GX Works3 ...ogramyWłasneprogram1_bazowanie_Scale home.gx3 - [ProgramBody: ProgPou [PRG] [FB
X w MElSOFT GX WOrks3 ...amyWłasneprogram1_bazowanie_proximitydoxk.gx3 - [Module Configuration] i
Narzędzia do optymalizacji • własne programy z wykorzystaniem bibliotek
P2070212 Tym baz danych prosta baz / danych o pojedynczej tabeli (np. Excel własne programy) j<l^
5. Państwa ą zobowiązane stworzyć swpję własne programy rozwojowe aby zrealizować wymienione cele.
2 dystrybucja - rozpowszechnianie własnego programu, współpraca z nadawcami kablowymi, obecność na w
s103 (2) Konfigurowanie środowiska 103 § CJser-specific environment and startup programs PATH=$PATH:
1. Uruchom program ABBYY FineReader Home Edition. Zostanie otwarte jego główne okn
Studia 1. stopnia Program studiów dla grup Język francuski zaawansowany (grupy Z) z modułem metodycz
Studia 1. stopnia Program studiów dla grup Język francuski zaawansowany (grupy Z) z modułem metodycz
Studia 1. stopnia Program studiów dla grup Język francuski zaawansowany (grupy Z) z modułem metodycz
więcej podobnych podstron