34471
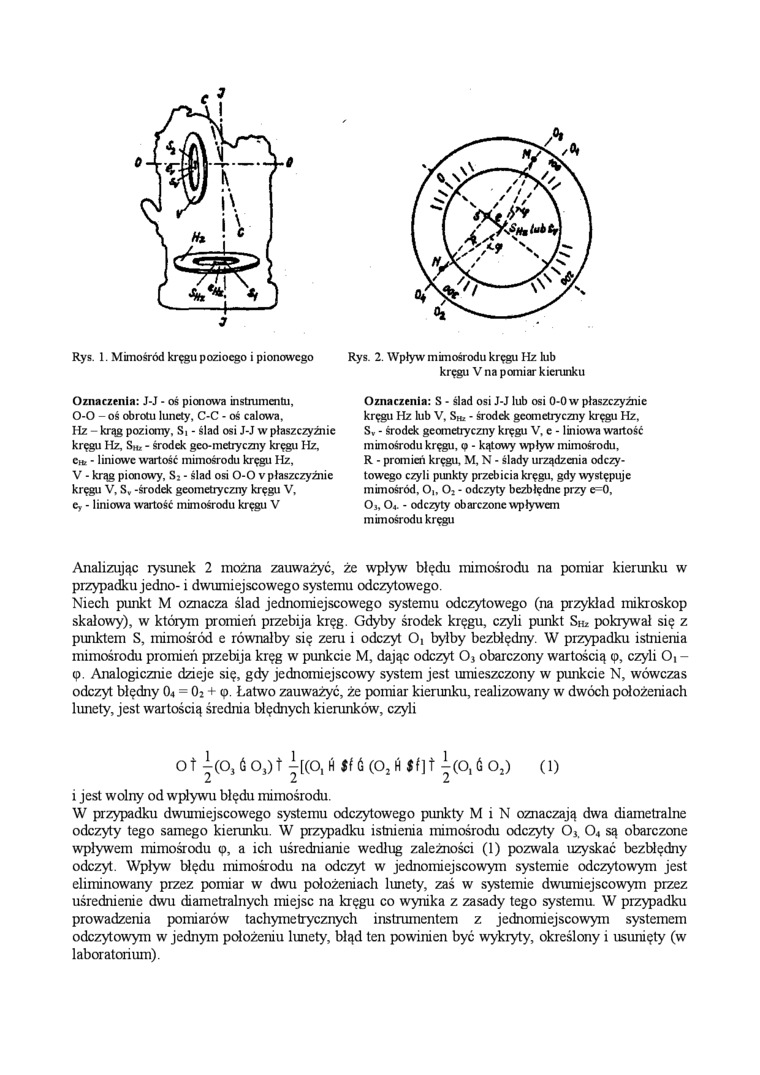
Rys. 1. Mimo śród kręgu poziocgo i pionowego
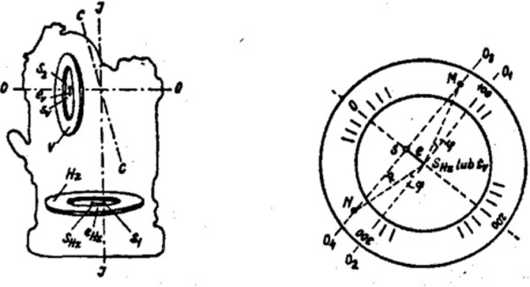
Rys. 2. Wpływ mimośrodu kręgu Hz łub
kręgu V na pomiar kierunku
Oznaczenia: J-J - oś pionowa instrumentu,
0-0 - oś obrotu lunety, C-C - oś calowa,
Hz - kraj poziomy, Si - ślad osi J-J w płaszczyźnie kręgu Hz, Sm - środek geo-metryczny kręgu Hz,
Cm - liniowe wartość mimośrodu kręgu Hz,
V - krąg pionowy, S2 - ślad osi 0-0 v płaszczyźnie kręgu V, Sv -środek geometryczny kręgu V, ty - liniowa wartość mimośrodu kręgu V
Oznaczenia: S - ślad osi J-J lub osi 0-0 w płaszczyźnie kręgu Hz łub V, Sm • środek geometryczny kręgu Hz, S» - środek geometryczny kręgu V, e - liniowa wartość mimośrodu kręgu, p - kątowy wpływ mimośrodu,
R - promień kręgu, M, N - ślady urządzenia odczytowego czyli punkty przebicia kręgu, gdy występuje mimośród. O,. 02 - odczyty bezbłędne przy e=0.
Oj, O4. - odczyty obarczone wpływem mimośrodu kręgu
Analizując rysunek 2 można zauważyć, że wpływ błędu mimośrodu na pomiar kierunku w przypadku jedno- i dwumiejscowego systemu odczytowego.
Niech punkt M oznacza ślad jednomiejscowego systemu odczytowego (na przykład mikroskop skalowy), w którym promień przebija kręg. Gdyby środek kręgu, czyli punkt Su* pokrywał się z punktem S, mimośród e równałby się zeru i odczyt Oi byłby bezbłędny. W przypadku istnienia mimośrodu promień przebija kręg w punkcie M, dając odczyt Oi obarczony wartością cp, czyli 0| -cp. Analogicznie dzieje się, gdy jednomiejscowy system jest umieszczony w punkcie N, wówczas odczyt błędny 04 = 02 + cp. Łatwo zauważyć, że pomiar kierunku, realizowany w dwóch położeniach lunety, jest wartością średnia błędnych kierunków, czyli
O t 1(0, 6 O,) t i[(o, H łf 6 (O, H il] t i(0, 6 O,) (1)
i jest wolny od wpływu błędu mimośrodu.
W przypadku dwumiejscowego systemu odczytowego punkty M i N oznaczają dwa diametralne odczyty tego samego kierunku. W przypadku istnienia mimośrodu odczyty Oj. 04 są obarczone wpływem mimośrodu cp, a ich uśrednianie według zależności (1) pozwala uzyskać bezbłędny odczyt. Wpływ błędu mimośrodu na odczyt w jednomiejscowym systemie odczytowym jest eliminowany przez pomiar w dwu położeniach lunety, zaś w systemie dwumiejscowym przez uśrednienie dwu diametralnych miejsc na kręgu co wynika z zasady tego systemu. W przypadku prowadzenia pomiarów tachymctrycznych instrumentem z jednomiejscowym systemem odczytowym w jednym położeniu lunety, błąd ten powinien być wykryty, określony i usunięty (w laboratorium).
Wyszukiwarka
Podobne podstrony:
Rys. 4.7 Wpływ filtru medianowego (a) oraz filtru uśredniającego (b) na krawędzie obiektu [15] Rys.
CCF20140219�0066 Rys. 3.6. Wpływ temperatury początkowej mieszaniny metanu z powietrzem na stężeniow
21 Nośność na zginanie Rys. 5* Wpływ procentu zbrojenia oraz klasy betonu na stosunek m ramienia sił
arcz 117 Rys. 7.4. Wpływ podwójnego postępu geometrycznego w stopniowaniu przełożeń na wskaz nik dyn
150-1 Rys. 4.Wpływ temperatur}- na charakterystykę przetwornika Błąd przetwarzania występujący w
skanuj0010 (376) a 0,2 0,4 0,6 w/c 0,8 Rys. 3.1. Wpływ skła
skrypt137 140 domies7ki Rys. 8.5. Wpływ domieszek na rczystywność aluminium [5] 2.2. PRZEWODNICTWO
g 282 9. Materiały odporne na promieniowanie 282 9. Materiały odporne na promieniowanie Rys. 9.9. Wp
D11 (6) Am[kg] 1,6 1,4 id 1,<o,o, o Rys. 8.1. Wpływ temperatury wychładzania Rys. ł półtusz wiepr
własności mechaniczne zelaza oddziałują w niewielkim stopniu Rys. 3.1. Wpływ niektórych pierwiastków
Wp?yw sk?adu chemicznego w?glik?w Węgliki potrójne Faza wiążąca (TiC, NbC, TaC) RY
więcej podobnych podstron