91100
Układy liniowe stacjonarne

Odpowiedź systemu x(t) sygnał wejściowy y(t) sygnał wyjściowy łi(t) odpowiedź impulsowa układu Odpowiedź impulsowa (na dystrybucję Diraca) określona jest następująco:
jeżeli x(t)=8(t) to y(t)=h(t)
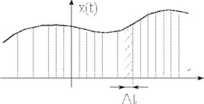
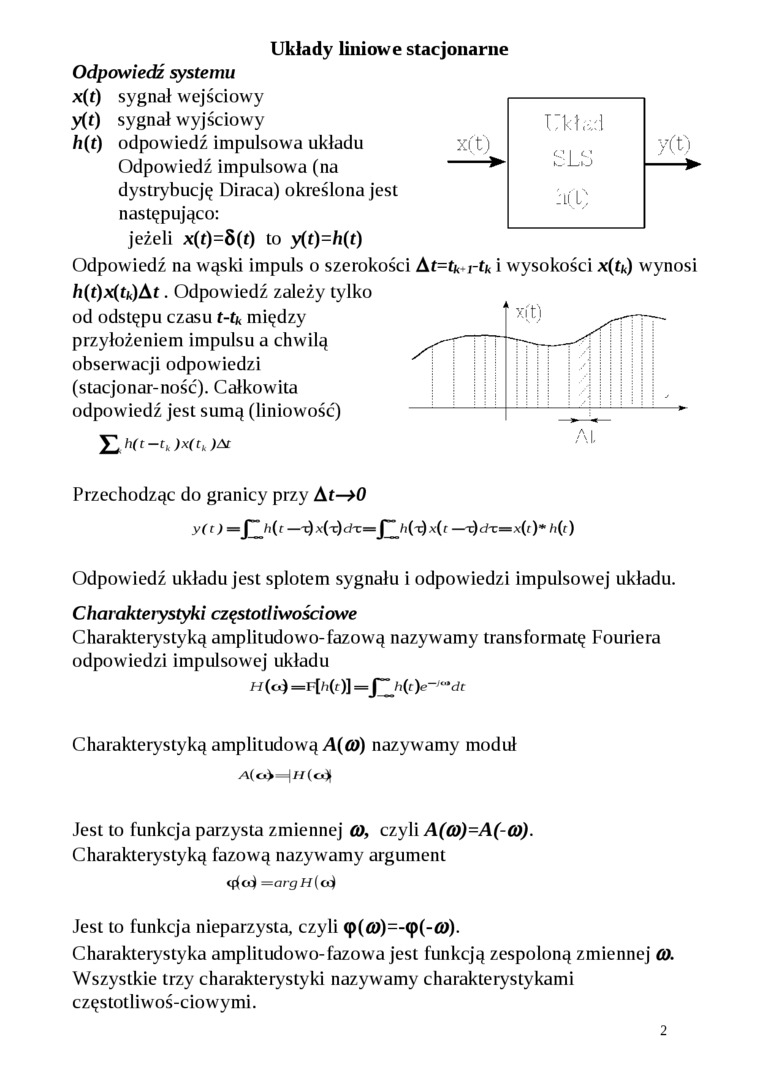
Odpowiedź na wąski impuls o szerokości At=t*.rt* i wysokości x(t*) wynosi /i(t)x(tfc)At. Odpowiedź zależy tylko od odstępu czasu t-t* między przyłożeniem impulsu a chwilą obserwacji odpowiedzi (stacjonar-ność). Całkowita odpowiedź jest sumą (liniowość)
£ h(c-tk )x(tk)At
Przechodząc do granicy przy At—>0
y( t) =f~ /i(t—T)x(x)dx=J~ fi(-i)x(r —r)dx=x(t)* h(t)
Odpowiedź układu jest splotem sygnału i odpowiedzi impulsowej układu. Charakterystyki częstotliwościowe
Charakterystyką amplitudowo-fazową nazywamy transformatę Fouriera odpowiedzi impulsowej układu
H (o) =Fl/i(0] =J~ h(r)e-/“dr
Charakterystyką amplitudową A((0) nazywamy moduł
Jest to funkcja parzysta zmiennej O), czyli A((0)=A(-t0). Charakterystyką fazową nazywamy argument
<((«) =argH(a)
Jest to funkcja nieparzysta, czyli <p(o)=-<p(-fi)).
Charakterystyka amplitudowo-fazowa jest funkcją zespoloną zmiennej to. Wszystkie trzy charakterystyki nazywamy charakterystykami częstotliwoś-ciowymi.
Wyszukiwarka
Podobne podstrony:
skrypt 36 Liniowa rwpONOZA śhepniok wadhatowa sygnałów stacjonarnych__ metryka zaś indukowana przez
scan0018 (19) Transmitancje narastający i rzeczywistego 16 , odpowiedzi skokowe, odpowiedzi na
10624820?6662845695775 54184279208941713 n 3. Dla kolejnych układów, przerysować sygnał wyjściowy i
więcej podobnych podstron