91261
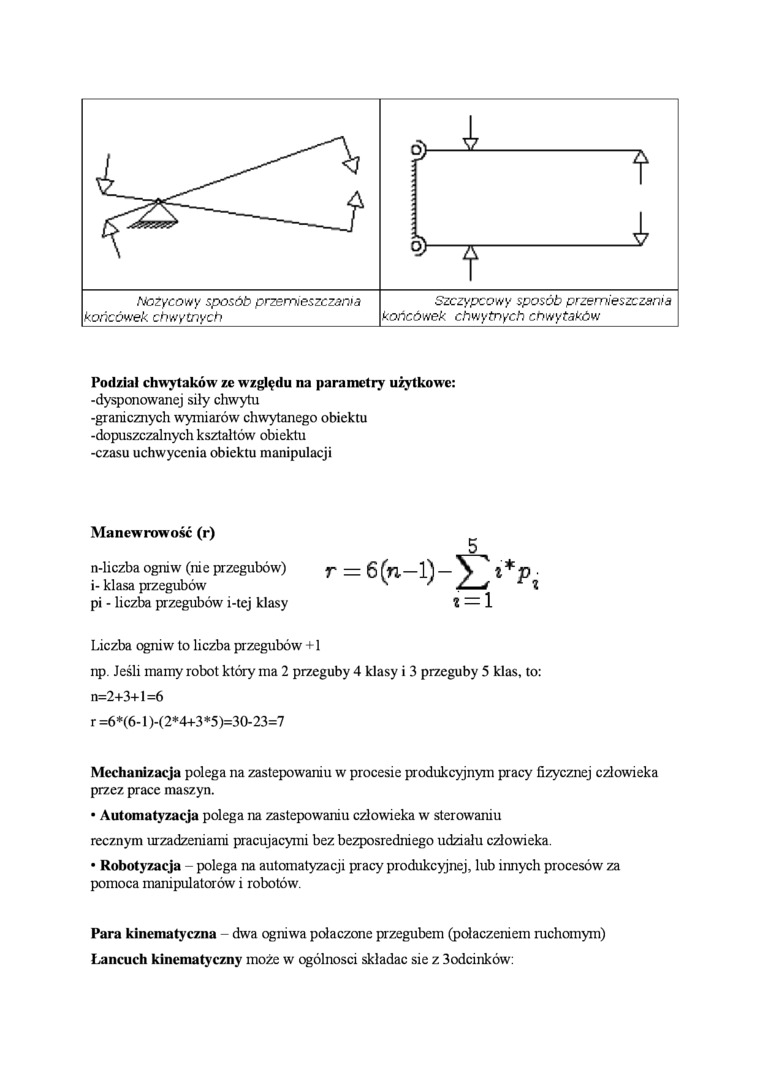
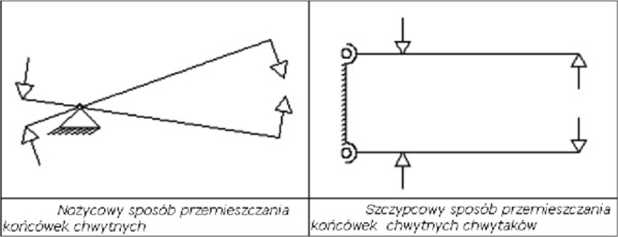
Podział chwytaków ze względu na parametry użytkowe:
-dysponowanej siły chwytu -granicznych wymiarów chwytanego obiektu -dopuszczalnych kształtów obiektu -czasu uchwycenia obiektu manipulacji
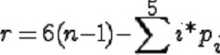
Manewrowość (r)
n-liczba ogniw (nie przegubów) i- klasa przegubów pi - liczba przegubów i-tej klasy t — 1
Liczba ogniw to liczba przegubów +1
np. Jeśli mamy robot który ma 2 przeguby 4 klasy i 3 przeguby 5 klas, to: n=2+3+1=6
r =6*(6-1 )-(2*4+3*5)=30-23=7
Mechanizacja polega na zastępowaniu w procesie produkcyjnym pracy fizycznej człowieka przez prace maszyn.
• Automatyzacja polega na zastępowaniu człowieka w sterowaniu ręcznym urządzeniami pracującymi bez bezpośredniego udziału człowieka.
• Robotyzacja - polega na automatyzacji pracy produkcyjnej, lub innych procesów za pomocą manipulatorów i robotów.
Para kinematyczna - dwa ogniwa połączone przegubem (połączeniem ruchomym) Łańcuch kinematyczny może w ogólności składać sie z 3odcinków:
Wyszukiwarka
Podobne podstrony:
Bonitacja gleb - podział gleb ze względu na ich wartość użytkową Cele bonitacji -
Zdjęcie0103 (18) Podział ze względu na komfort użytkownika System „odbierz” - zbiórka u źródła. i Zb
Zdjęcie0104 (18) Podział ze względu na komfort użytkownika System „dostarcz” ■ Sys
Geologia0004 PODZIAŁ TEKSTUR ZE WZGLĘDU NA STOPIEŃ KRYŚTALICZNOŚCJ SUBSTANCJI MINERALNEJ 1 AJależy
Gramofon GS 461, GS 463, GS 464 1 33/45 START A Oznaczenie elementów ważnych ze względu na bezpiecze
Zdjęcie0618 (2) Kwasy i zasadyTeoria dysocjacji elektrolitycznej wg. Anheniusa (1887) Podział elektr
skanuj0151 (7) Rozdział 6.4 Ze względu na sposób użytkowania rampy magazynowe dzieli się na: •
IMG027 27 2.4. KLASYFIKACJA NIEBEZPIECZEŃSTWA PORAŻENIA ORAZ PODZIAŁ ODBIORNIKÓW ZE WZGLęDU NA OCHRO
Po raz pierwszy Rossen i Miller (1973) i Harper (1978) przedstawili podział ekstruderów ze względu&n
więcej podobnych podstron