3784503539
1 boi- fe & 1 •*<***»• \\noi<iii »-i-^-gseig.|_
*»-«l j) ĆlH *** •• ..«*>* rew
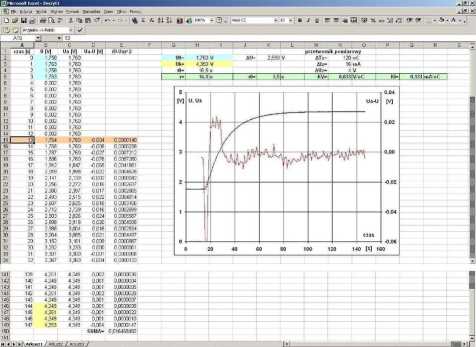
Rys. 5.4. Wyniki obliczeń
Wartość Uo obliczono jako średnią arytmetyczną z czterech początkowych pomiarów, natomiast (A jest średnią arytmetyczną z czterech końcowych pomiarów. Aby obliczyć zgodnie z (5.1) Ua należy, jako początkowe dla procesu aproksymacji, przyjąć wartości przybliżone: opóźnienia to (H4) oraz stałej czasowej r (H5). Opóźnienie to jest opóźnieniem określonym od początku pomiarów, od czas = 0 s i nie jest to opóźnienie z transmitancji (3.3) opisującej człon inercyjny pierwszego rzędu z opóźnieniem. Przybliżoną wartość opóźnienia jaką wnosi cały tor pomiarowy można określić, jako:
ro=to~*z (5-2)
gdzie: tz - czas zanurzenia czujnika pomiarowego do „naczynia z gorącą wodą".
Posługując się dodatkiem Solver należy obliczyć takie wartości t0 i r, aby SUMA kwadratów różnic między pomiarem, a obliczeniami aproksymacyjnymi (I(Ua-U)2) osiągnęła minimum, a następnie zgodnie z (5.2) obliczyć wartość opóźnienia To-
Znając zakres pomiarowy przetwornika ATz, zakres zmian prądu Alz = 16 mA i odpowiadający mu zakres zmian spadku napięcia na rezystorze 250 Q - AUz = 4 V, można określić współczynniki wzmocnienia zastępczych transmitancji: prądowej KI oraz napięciowej KV:
KI =
ATZ
AL
KV
ATZ
AU,
(5.3)
20
Wyszukiwarka
Podobne podstrony:
img162 tts li s-e Iii-I lilii «• «l c. ~ •3 3 ii 13 § i 2 - £ ?‘fę f-;s2 » * • m *
IMGW20 (Kopiowanie) jŚfljfc U<u,JUL fortel.. -.WtU- * ■ -fe--^-5<3o7 55 ....... &9£ (160 S
s, = Ł—!!ł = ^!ł (III) lub £, =^!i-100% (IV) lo >0
.* Śho^tdu/ritf) 24UM/fę * P>I&XKMC<? \^ -P~Y-R+ £
Pd <) - ł a(^cęico(>^fe£i reakcji a j, csocŁę) / ~ £ O pasowi.
więcej podobnych podstron