3784503812
PRZEGLĄD GÓRNICZY
2010
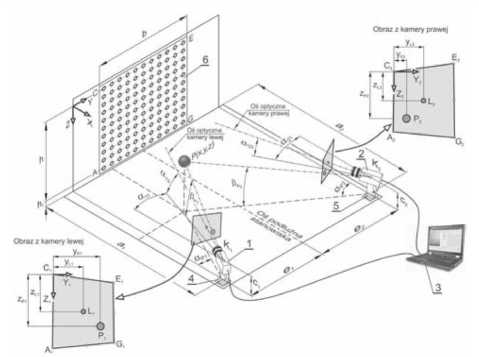
Rys. 1. Konfiguracja stanowiska pomiarowego, elementy jego orientacji zewnętrznej oraz model geometryczny dla potrzeb wyznaczenia położenia przestrzennego punktu pomiarowego P
PPi = arc tg< przy czym
Rozmieszczenie kamer (położenie środków rzutów K, i K2 w przestrzeni stanow iska pomiarowego) oraz kierunek ich osi optycznych określone jest przez elementy orientacji zew nętrznej: a,, c, i e, - w przypadku kamery lewej oraz a2, c2 i ev - dla kamery' prawej. Kientnek osi optycznych kamer wyznaczonych przez środki rzutów K, i K, oraz ich ortogonalne rzuty na płaszczyzny tłowe obu kamer L, i L, definiowane są przy tym za pomocą kąta zwrotu: a„ ia2l oraz kąta nachylenia osi kamery': al2 i a22.
Układy optyczne standardowych kamer cyfrowych, w szczególności te mniej precyzyjne, wywołują zniekształcenia geometryczne obrazów zw iązane z ich dystorsją radialną [7], W celu minimalizacji generowanych tą drogą błędów' pomiarowych dokonana została korekcja geometry czna obrazów' cyfrowych oraz ich przekształcenie z postaci pikselowej do postaci, w której współrzędne poszczególnych punktów obrazów' wyrażone są w jednostkach długości. Wyznaczenie poszukiwanych funkcji opisujący ch to przekształcenie zrealizowane zostało w trakcie kalibracji kamer z wykorzystaniem siatki punktów' ekranu kalibracyjnego 6 o znanych współrzędnych przestrzennych. Zastosowano tu przy tym model matematy czny w formie ilorazów wielomianów drugiego stopnia.
W celu wyznaczenia relacji pomiędzy współrzędnymi rzeczywistymi oraz współrzędnymi obrazów' w płaszczyźnie matryc światłoczułych (płaszczyźnie tlowej) obu kamer rozpatrzono punkt P oraz odpow iadające mu punkty : P i P będące jego odwzorowaniem (rzutem środkowym) w tych płaszczyznach. Przestrzenne położenie punktu P opisane jest za pomocą współrzędnych: x,yiz, natomiast położenie punktów'jego odwzorow ania w płaszczyznach tłowych kamer - za pomocą współrzędnych w układzie płaskim: yPI i zpl -w pizypadku obrazu z kamery lew ej oraz. yp: i zp2 - w przypadku obrazu z karnety prawej.
Kierunek wektorów wodzących punktu P wyznaczony pizez proste łączące ten punkt ze środkami rzutów K, i K2 określony jest za pomocą kątów': apl i pPI - w przy padku obrazu z kameiy lewej oraz aP2 i PP2 - w; przy padku obrazu z kamery prawej. Wartości tych kątów w funkcji w spółrzędnych punktów obrazu P, i P2 wyznaczyć można przy tym z następujących wzorów:
aPi =a:,iarctg-—c-—r
^■tg(aiJ+(z,i-Zpi)]-cos(aPi-aJ
. /i “ (Z Li “ Z Pi )' tg(cti2 )
Wyszukiwarka
Podobne podstrony:
PRZEGLĄD GÓRNICZY 2010 Rys. 1. Konfiguracja stanowiska pomiarowego, elementy jego orientacji zewnętr
PRZEGLĄD GÓRNICZY 2010 Rys. 1. Konfiguracja stanowiska pomiarowego, elementy jego orientacji zewnętr
PRZEGLĄD GÓRNICZY 2010 Rozdzielczość kamer, MP* Rys. 2. Wpływ rozdzielczości kamer na maksymalne
PRZEGLĄD GÓRNICZY 2010 PRZEGLĄD GÓRNICZY 2010 fcaupnstałuo* Rys. 4. Zależność maksymalnej
PRZEGLĄD GÓRNICZY 2010 Rozdzielczość kamer, MP* Rys. 2. Wpływ rozdzielczości kamer na maksymalne
PRZEGLĄD GÓRNICZY 2010 PRZEGLĄD GÓRNICZY 2010 fcaupnstałuo* Rys. 4. Zależność maksymalnej
PRZEGLĄD GÓRNICZY 2010 Rozdzielczość kamer, MP* Rys. 2. Wpływ rozdzielczości kamer na maksymalne
PRZEGLĄD GÓRNICZY 2010 PRZEGLĄD GÓRNICZY 2010 fcaupnstałuo* Rys. 4. Zależność maksymalnej
P5202147 Rys. 2. Schemat stanowisku 3. Pomiary Pomiary przeprowadzić zgodnie z zakresami przyrządów
przewodnosc cieplana�8 Rys,7.7 Schemat stanowiska pomiarowego: I • izolacja ze styropianu, 2 - naczy
wydymała1 Rys. li). Stanowisko pomiarowe I- bela, 2 - mostek. 3 - obciążenie belld, 4 - podpory5.4.
116 ..Ćwiczenia laboratoryjne z mechaniki płynów" Rys. 8 Schemat stanowiska pomiarowego do wzor
Rys. 5. Widok stanowiska pomiarowego wraz ze schematami układów pomiarowych. Badanie stabilizatorów
PRZEGLĄD GÓRNICZY 2010 UKD: 622.273.2:622.221:622.031.4:622.831.244:622.831.249-047.37:Ocena
PRZEGLĄD GÓRNICZY 2010 PRZEGLĄD GÓRNICZY 2010 wytrł
PRZEGLĄD GÓRNICZY 2010 UKD: 519.61:622.245.12:622.241.7-047.37:622.24.08:531.1:531.38:531.2Analiza
PRZEGLĄD GÓRNICZY 2010 energii elektrycznej pochodzi z węgla). Jest oczywistym, że dla potrzeb ochro
więcej podobnych podstron