9990200019
2. Podstawy teoretyczne 12
2.5 Generator chodu - wersja iteracyjna
Przedstawiony w rozdziale 2.4 generator chodu opiera się na pewnym uproszczeniu przedstawionym w pozycji [21]. Mianowicie algorytm wymaga wyznaczenia pozycji stopy jedynie na początku i na końcu fazy podporowej. Pozwala to na znaczne uproszczenie obliczeń, wykonuje się je raz przed przystąpieniem do danego kroku. Za przemieszczenie stopy z jednej pozycji do drugiej odpowiada generator lokalny danej nogi. Przykład takiego lokalnego generatora omówiony został przy okazji omawiania lokalnego sterownika nogi w rozdziale 3.3.
Przedstawiony w poprzednim rozdziale generator niestety nie pozwala na płynne śledzenie trajektorii przez robota. Możliwość zmiany parametrów kroczenia istnieje tylko przed przystąpieniem do kolejnego kroku. Ponadto przedstawione uproszczenie zakłada, że pomiędzy kolejnymi fazami kroku stopa przemiesza się po lini prostej. Wprowadza to poślizgi podczas kroczenia po łuku (rysunek 2.7).
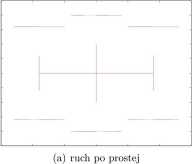
Rysunek 2.7 Trajektoria stóp podczas kroczenia (generator chodu wersja 1)
W rozdziale tym przedstawiono usprawniona wersję generatora chodu, pozbawioną wspomnianych wad.
Iteracyjny algorytm kroczenia
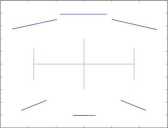
Podstawową zmianą w stosunku do poprzednio omówionego algorytmu, jest to, że w proponowanej modyfikacji przeliczenia dokonywane są iteracyjnie co pewien przedział czasu At. W praktycznej realizacji At = 20ras, wynika to z maksymalnej częstotliwości z jaką można zadawać pozycję dla zastosowanych serw modelarskich. Algorytm pozwala na zmianę parametrów kroczenia w dowolnym momencie, co umożliwia na śledzenie trajektorii. Ponadto algorytm umożliwia kroczenie po nierównościach oraz pozbawiony jest problemu poślizgów podczas kroczenia po łukach (rysunek 2.8).
Parametry kroczenia:
• vy - prędkość wzdłuż osi OY,
• vx - prędkość wzdłuż osi OX,
• vaz ~ prędkość kątowa wokół osi OZ.
Wyszukiwarka
Podobne podstrony:
Rozdział 2. Podstawy teoretyczne wybranych metod reprezentacji wiedzy2.1 Wprowadzenie Niniejszy rozd
HES? Inżynieria Środowiska - Podstawy prawodawstwa i ekonomii Test zaliczający: wersja A 8. Przedsię
L. PODSTAWY TEORETYCZNE Termografia - określenie i przedstawienie rozkładu temperatury powierzchni o
Inżynieria środowiska - Podstawy prawodawstwa i ekonomii Test zaliczający: wersja B 8, Przedsiębiors
Inżynieria Środowiska - Podstawy prawodawstwa i ekonomii 1 est zaliczający; wersja A S Przedsiębiors
HES? Inżynieria środowiska - Podstawy prawodawstwa i ekonomii Test zaliczający: wersja B 8. Przedsię
L. PODSTAWY TEORETYCZNE Termografia - określenie i przedstawienie rozkładu temperatury powierzchni o
000XV PRZEDMOWA DO WYDANIA PIĄTEGO W książce tej przedstawiliśmy Czytelnikom podstawy teoretyczne i
L. PODSTAWY TEORETYCZNE Termografia - określenie i przedstawienie rozkładu temperatury powierzchni o
strona (11) CZĘSC iSZKIC HISTORYCZNY I ZARYS PODSTAW TEORETYCZNYCH KINEZYTERAPII Andrzej Zembaty Prz
2. Podstawy teoretyczne 10 Tabela 2.1 przedstawia kolejne etapy przemieszczenia robota o jeden krok.
więcej podobnych podstron