2500335808
126
Bartosz Jabłoński. Ryszard Klempous. Damian Majchrzak
3. 2 Sygnały rotacji w jednym wymiarze
Systemy MC pomimo tego, iż są bardzo dokładne, mają bardzo ograniczone możliwości zastosowań. W praktyce o wiele częściej spotykane są systemy rejestracji wideo. Aby zasymulować dane dostarczane z takiego systemu na potrzeby niniejszego eksperymentu, ograniczono się do rotacji względem osi X. Jest to równoznaczne z analizą materiału przy ruchu prostopadłym do kamery (rysunek 4).
Rys. 4. Układ współrzędnych w badanych plikach na przykładzie standard.bvh.
W badaniach brano rotacje X prawego uda, podudzia oraz lewego uda. Naturalnym podejściem byłoby zbadanie ruchu stopy, co jednak jest trudne do przeprowadzenia w praktyce. Zaletą tak skonstruowanych parametrów ruchu jest także wrażliwość na niesymetryczności pomiędzy ruchem lewego i prawego uda. Wyniki analizy przedstawia rysunek 5. W tym przypadku widać wyniki dostosowania okresów wyżej wymienionych sygnałów rotacji. Badanie części z zarejestrowanego sygnału występuje w sytuacji w praktyce, gdy sygnał jest znacznie zakłócony i niedostępny w całości do rejestracji.
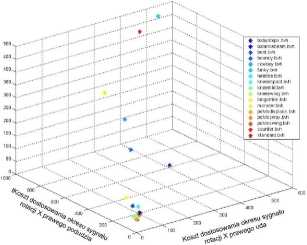
Rys. 5. Koszt dostosowania okresów sygnałów rotacji X (prawe udo, prawe kolano, lewe udo) metodą DTW do analogicznych okresów sygnałów sygnału wzorcowego armout.bvh.
4. Klasteryzacja
Proponuje się przeprowadzić klasteryzację badanych sekwencji ruchów. Jej celem ma być określenie, czy ruchy pochodzą od jednego osobnika, czy też znacznie różnią się od siebie. Konstruowany proces będzie rodzajem klasyfikacji „bez nadzorcy”. Dalszym krokiem może być opracowanie właściwych metod identyfikacji nowych danych przez klasteryzację „z nadzorcą”. W takim przypadku z góry określone są grupy ruchów, do których
Wyszukiwarka
Podobne podstrony:
126 Bartosz Jabłoński. Ryszard Klempous. Damian Majchrzak 3. 2 Sygnały rotacji w jednym wymiarze Sys
122 Bartosz Jabłoński. Ryszard Klempous. Damian Majchrzak z dobrym rezultatem być użyte w
124 Bartosz Jabłoński. Ryszard Klempous. Damian Majchrzak Rys. 1. Sumy wartości skutecznych 30
128 Bartosz Jabłoński. Ryszard Klempous, Damian Majchrzak Wady powyższej metody skłaniają do podejśc
122 Bartosz Jabłoński. Ryszard Klempous. Damian Majchrzak z dobrym rezultatem być użyte w
124 Bartosz Jabłoński. Ryszard Klempous. Damian Majchrzak Rys. 1. Sumy wartości skutecznych 30
128 Bartosz Jabłoński. Ryszard Klempous, Damian Majchrzak Wady powyższej metody skłaniają do podejśc
RADA NAUKOWA Adam Bartoszek (UŚ), Ryszard Borowicz (t), Anna Buchner-Jeziorska (UL), Urszula Chęcińs
126 MARTYNA DAROWSKA W chwili obecnej w żadnej z polskich bibliotek nie wdrożono jeszcze systemu
232 233 232 O nych sygnałów. Asortyment i funkcje pełnione w systemie przez te układy, dostępne w po
więcej podobnych podstron