1148442536
Utworzenie: PRz, 2010, Żabiński Tomasz
Modyfikacja: PRz, 2015, Michał Markiewicz
MATERIAŁY DODATKOWE Modelowanie tarcia
Modelowanie oraz identyfikacja tarcia pozwalają zrozumieć związane z tym zjawiskiem mechanizmy, wywołujące pewne niekorzystne efekty w układach mechatronicznych. Modele ułatwiają tworzenie skuteczniejszych metod kompensacji oraz umożliwiają ich symulacyjną weryfikację.
Modele tarcia najogólniej można podzielić na trzy grupy: while-box, black-box oraz grey-box. White-box wykorzystują podstawy fizyczne badanego zjawiska i dzieli się je na statyczne oraz dynamiczne. W modelach black-box (bazujących na danych eksperymentalnych) stosuje się zazwyczaj sieci neuronowe i struktury rozmyte. Z kolei grey-box łączą cechy dwóch poprzednich.
Podstawowe modele tarcia wykorzystywane do sterowania zakładają wiele uproszczeń, np. stacjonamość lub niewystępowanie rozłożenia parametrów.
Statyczne modele white-box
Statyczne modele white-box, przy pomocy równań algebraicznych, opisują podstawowe własności tarcia. Wyróżnia się wśród nich modele klasyczne uwzględniające różne kombinacje tarcia Coulomba (Fc), wiskotycznego (Fv), statycznego (Fs) oraz efektu Stribecka. Charakterystyka przedstawiona na Rys. lOa, uwzględnia tarcie wiskotyczne oraz Coulomba i jest opisana zależnością Ff(y) = (Fc + Fv|v|)sgn( v), gdzie v oznacza prędkość. Na Rys. lOb
, , . ... f±F; : v = 0
dodano tarcie statyczne otrzymując równanie Fr(v) = < . ,
' [(i7. +F„|v|)sgn( v): v *0
Charakterystykę z Rys. lOc uzyskano uwzględniając efekt Stribecka. Jej model matematyczny dany jest wzorem
f±F5 :v = 0
Ff(y)=\ » (u)
[(Fc + (Fs -Fc)e 1'•' + Fv|v|)sgn( v) : v * 0
gdzie vs to tzw. prędkość Stribecka.
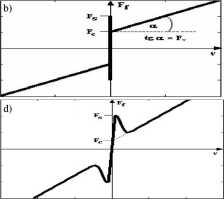
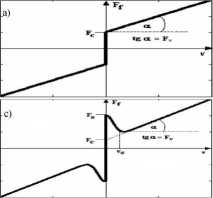
Rys. 10. Statyczne modele tarcia. Oznaczenia: Fr- siła tarcia. v - prędkość. Fc - tarcie Coulomba. Fv-wiskotyczne, Fs - statyczne. vs - prędkość Stribecka
Wyszukiwarka
Podobne podstrony:
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał MarkiewiczLABORATORIUM: Sterow
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz Przedstawione model
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz Symulacje układów
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz Rys. 13. Drgania ci
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz1. Opis stanowiska
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz UWAGA! Nie należy
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz • Po wykonaniu
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz Rys. 3. Schemat Sim
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz UWAGA ! Dla schemat
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz Filtr wstępny przyj
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz które po uproszczen
Utworzenie: PRz, 2010, Żabiński Tomasz Modyfikacja: PRz, 2015, Michał Markiewicz Wykonaj eksperyment
więcej podobnych podstron