1484605289
2.4.2. Ruchliwość warunkowa - więzy bierne
Układ ABCDEF (rys. 20a) jest układem sztywnym - nieruchliwym. To stwierdzenie wynika zarówno z oceny jakościowej, jak i z rozważań strukturalnych (W = 0). Gdy jednak (przy tej samej strukturze układu) dobrać szczególne wartości jego wymiarów podstawowych, np. przyjąć, że AABF = ADCE oraz BC = EF = AD (rys. 20b), otrzymamy układ fizycznie ruchliwy. Można go wykorzystać realnie do przeniesienia ruchu obrotowego wału A na ruch wału D. Zgodnie z dotychczasową umową takiemu układowi należy przypisać Wrz = 1. Tego typu ruchliwość (nie przewidzianą teoretycznie, a stwierdzoną fizycznie) nazywać będziemy dalej ruchliwością warunkową. Zaistnieje ona bowiem tylko wtedy, gdy pewne wymiary podstawowe rozpatrywanego układu spełniają określone warunki. Wtedy niektóre ograniczenia, czyli inaczej więzy, są powtórzeniem już istniejących i fizycznie nie dają o sobie znać. Takie dodatkowe i zbędne kinematycznie ograniczenia nazywa się więzami biernymi. Ich liczbę Rb w łańcuchu kinematycznym można określić, jeżeli znana jest ruchliwość rzeczywista Wrz (ta fizycznie istniejąca) oraz ruchliwość teoretyczna W:
Rb = Wrz ~ W (3)
W analizowanym układzie z rys. 20b jest więc Wrz =1, W = 0, czyli Rb = 1. Do układów kinematycznych, w których Rb> 0 stosuje się określenie układy nieracjonalne. Określenie to wydaje się trafne, zwłaszcza gdy uzmysłowić sobie jak niełatwo spełnić takie narzucone geometryczne warunki ruchu.
Pozostając jeszcze przy układach nieracjonalnych, należy zauważyć dalej, że narzucone tu geometryczne warunki ruchu można w praktyce spełniać tylko z pewnym przybliżeniem. W rezultacie układy te na ogół sprawiają wiele problemów wykonawczych i montażowych. Są przyczyną pojawiania się w układzie dodatkowych obciążeń, zwiększonego zużycia itd. [15], [23].
Ze względu na duże znaczenie omawianych problemów związanych z tymi więzami biernymi zostaną rozpatrzone dalsze przykłady.
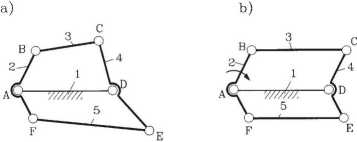
Rys. 20. Ilustracja pojęcia więzów biernych
Wyszukiwarka
Podobne podstrony:
I kład napędowy, jednokwadrantowy. łYzetwornice, układ zaporowy Przetwornica zaporowa jest układem
Slajd01 out Poprzedni wykład: Więzy bierne, WB WR = WT - WL + WB WB > 0 -» układ nieracjonalny !!
Image325 Układ przedstawiony na rys. 4.372, spełniający równanie (14), jest układem najszybszym, gdy
Image382 Typowym reprezentantem multiplekserów scalonych jest układ 150 (rys. 4.444). Układ ten jest
Image386 Układ 155 *> i 156 **> (rys. 4.449) jest demultiplekserem mającym: — &nbs
Image574 Układ 75450 (rys. 4.762) zawiera dwie bramki I-NIE (NAND) i dwa niezależne tranzystory n-p-
Image588 Rozpatrzymy nadajnik zbudowany w oparciu o układ 75450 (rys. 4.786). Rezystor R umożliwia p
img204 204 Q *FSK^ UKŁAD STERUJĄCY1 X(t) Rys. 1.80. Kluczowanie częstotliwości FSK z ciągłą fazę: a)
więcej podobnych podstron