1800320785
268 PROBLEMY EKSPLOATACJI 4-2007
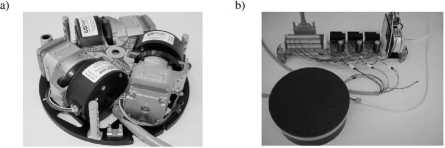
Rys. 3. Manipulator: a) układ napędowy, b) manipulator z systemem sterowania
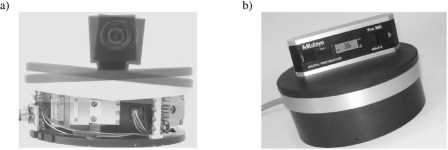
Rys. 4. Zakres roboczy manipulatora: a) pozycjonowanie kamery, b) pomiar poziomicą 3. Oprogramowanie
Oprogramowanie manipulatora umożliwia sterowanie efektorem w kinematyce odwrotnej. Kinematyka prosta jest wykorzystana do wizualizacji położenia wirtualnego efektora w osobnym oknie podglądu. Oprogramowanie sterujące pracuje z zastosowaniem opracowanego matematycznego modelu konstrukcji.
Pozycja efektora może być zadawana absolutnie lub przyrostowo. Możliwy jest także wybór konturu trajektorii dla wektora normalnego płaszczyzny efektora. We współrzędnych absolutnych możliwe jest zdefiniowanie płaszczyzny zadanej pięcioma sposobami:
- przez podanie kątów obrotu wokół osi X i Y oraz wzniesienia ponad punkt neutralny (a, p, h),
- przez podanie współrzędnych wektora normalnego płaszczyzny zadanej oraz wzniesienia ponad punkt neutralny,
- przez podanie współrzędnych trzech punktów, na których rozpięta jest płaszczyzna zadana,
Wyszukiwarka
Podobne podstrony:
270 PROBLEMY EKSPLOATACJI 4-2007 Rys. 6. Okno wyboru trajektorii Rys. 7. Okno edycji parametrów
272 PROBLEMY EKSPLOATACJI 4-2007 a) Rys. 10. Charakterystyka kinematyczna efektora: a) wznios w
4-2007 PROBLEMY EKSPLOATACJI 267 a) b) Rys.l. Schemat mechanizmu mimośrodoweg
266 PROBLEMY EKSPLOATACJI 4-2007 wykorzystywanych w badaniach laboratoryjnych, np. w optyce do
2-2012 PROBLEMY EKSPLOATACJI 81 Rys. 1. Typowa puszka napojowa: 1 - denko, 2 - kołnierz, 3 - re
4-2011 PROBLEMY EKSPLOATACJI 209 Rys. 2. Zrobotyzowane stanowisko obróbki laserowej z laserem d
4-2011 PROBLEMY EKSPLOATACJI 211 Rys. 4. Proces spawania laserem impulsowym i wpływ częstotliwo
4-2011 PROBLEMY EKSPLOATACJI 177 Rys. 1. Stanowisko do badania procesów zużyciowych w sprężarka
180 PROBLEMY EKSPLOATACJI 4-2011 Rys. 4. Korpus sprężarki. Powierzchnie ślizgowe ruchu obrotowe
więcej podobnych podstron