2251772809
|
■ il PLrzl. |
txt.m* x 1 |
|
1 - |
s=tf(’ s ’) ; |
|
2 - |
<3-1/ (l*s+l) ; |
|
3 | |
|
4 - |
Kp=l; |
|
5 - |
Ki-1; |
|
6 - |
R=Kp+Ki/s; . . . |
|
7 | |
|
8 - |
[C info]= pidtune (G,’p:i') |
|
9 - |
Gz=feedback(G*R, 1) ; |
|
10 - |
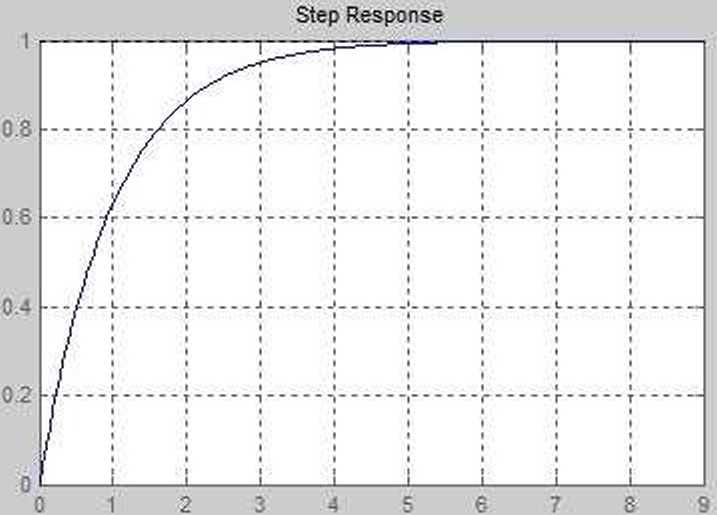
step(Gz) |
|
11 - |
stepir.fo (Gz) |
Command Window C =
Kp + Ki *---
3
with Kp = 0.473, Ki = 1.6
H Figurę 1
File Edit View Insert Tools Desktop Window Help
Continuous-time FI controller ir. parallel form.
info =
Stable: 1
CrossoverFrequency: 1.1237 PhaseMargin: 60.0000
ans =
|
RiseTime: |
2.1970 |
|
SettlingTime: |
3.9121 |
|
SettlingMin: |
0.9045 |
|
SettlingMax: |
1.0000 |
|
Overshoot: |
0 |
|
Undershoot: |
0 |
|
Peak: |
1.0000 |
|
PeakTime: |
10.5453 |
Wyszukiwarka
Podobne podstrony:
PI_rzlOto_txt.m x) 1 - s=tf( 3 ); 2 - G=l/(10*3+1)*exp(-s) ; 3 - Kp=l; Ki=l; 4
dom(6) il * ]/&p fx y -3 vi ■ 5 Tf^ĘĘf ^-E 1 DP _ » łK ^ j
391245 original > i jrim ~ TrV s il"łn Vr 1 /•Tf I ii 11 i If /l > 1 ■ ■ 1
Front AUTłlOR OF Sl! 1 i H LlNfSt, Three bridcs. One groom The chasc ił on. . £W Yukk Tf.MŹJ BESTSŁL
SL372057 •o ‘ił Tf * ■o ii iu l-J 0 O fr 13 - 1 i i r». Al
SL372057 •o ‘ił Tf * ■o ii iu l-J 0 O fr 13 - 1 i i r». Al
SL387018 JSttWj/Wrt L jW.iUłC/ił; bmioJnłtii rrcni b%fdcLcc tf.fcdi/i tnscfjf ■ &frwił . nitUłi
Ganchillo Artistico Nr 1 v ~ ĘR ’ ,tf» rvi® K-t_ . *£t x* ił P- H
Wynika tf^il ujńlnj nnloMk. >* pi/nlitęU«rr» opłaci ilę pwl«y««ć cenę tylko wówczas, gdy cnw»i
IMAG0113 (4) 4 10 6 M»ia» M«t» - »v/r!ł >« .!,■ - ■ <! -i
Interface14?se iq «Lłn m h"h x,c
B^nl Bil s m -,; ■ ;>Hf mbbkh BPI il L ^Bl Kg
więcej podobnych podstron