2251772813
HO _j j Nor mai
Function 8iock Parameters: PID Controller
Main

Controller parameters
PI. rzlOto
©
Step
PIO)
1
t0s-1
n
Proportional (P): 1 Integral (I): 1
R CompenatęLfęrmulą
Tune...
Initial conditions
PO Ccntrotter Transie* Fen Transport
Oetey
Scope
|
EJ ?ID Tuner (PI_mlOto/PID Controller) |
f i—■ i—i1 | ||||
|
\ % O |
.,/i Design modę: |
Time domain ▼ |
Form: Parallel Type: PI | ||
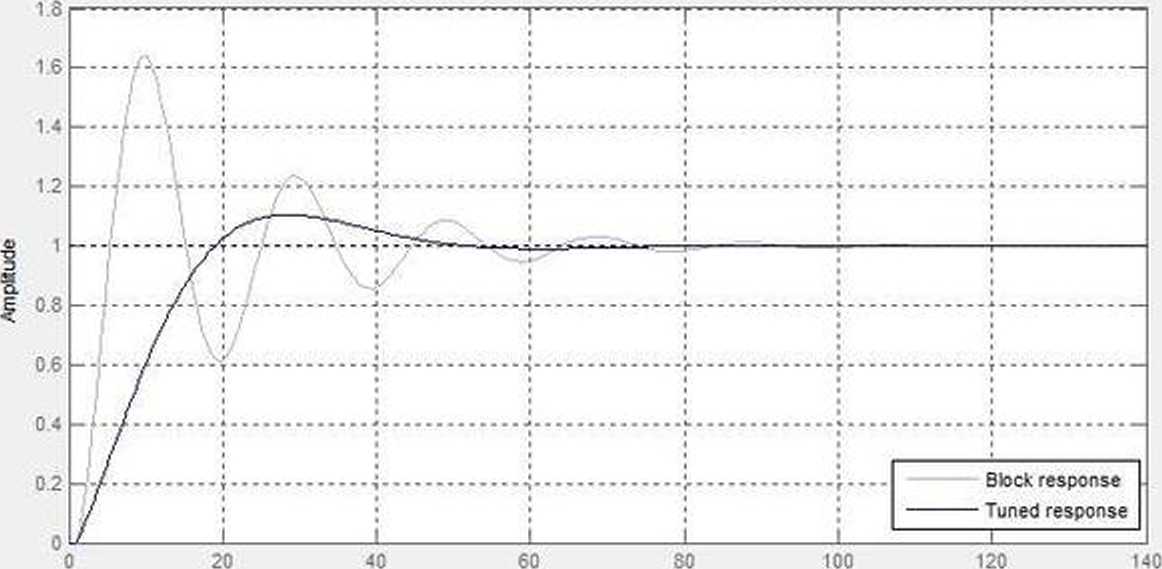
Plot:
Response:
Reference tracking
«/ Show błock response
Hide parameters ^
Controller parameters
|
Tuned |
Błock | |
|
P |
0.55219 |
1 |
|
014064 |
1 | |
|
D | ||
|
N |
|
Performance and robustness | ||
|
Tuned |
8lock | |
|
Rise time |
13.2 seconds |
3.29 seconds |
|
Settlingtime |
45.6 seconds |
71.5 seconds |
|
Overshoot |
10.5 % |
63.8 % |
|
Peak |
11 |
1.64 |
|
Gain margin |
28.4 dB © 1.47 rad/s 14 dB © 0.798 rad/s | |
|
Phase margin |
60 deg © 0.105 rad/s 17 deg © 0.316 rad/s | |
|
Closed-loop stability Stable |
Stable | |
Wyszukiwarka
Podobne podstrony:
*1 thyl * File Edit View Display Diagram thyl « © [*ł]thy1 Simulation Analysis Codę Tools ^ Update
File Edit View Display Diagram SimulaDon Analysis Codę Tools Help ^ a
File Edit View Display Diagram Simulation Analysis Codę Tools Help - HO ag>
rtdacpci_Drivers X File Edit View Display Diagram Simulation Ąnalysis Codę Jools Help (SB
post fit [V] ModelSim SE 6.5c Ę File Edit View Compile Simulate Add Wave Tools Layout Window Help□ -
behavioral [vjModelSim SE 6.5c File Edit View Compile Simulate Add Wave Tools Layout Window Help□ •e
- Microchip Application Maestro File Edit Tools HelpI^J ggjtleg11(ASII Clock: [200
tomek wejściowa - OrCAD PSpice A/D Demo - [wejsciowa.dat (active)] - aU §f
4 (247) sjl £ile Edit View Simulation Tracę Plot Tools Window Help & X j] - b m o o ( Schernatic
Pl.rzl * File Edit View Display Diagram Simułation Analysis C .--tli■aSiMain PID AdvancedController
więcej podobnych podstron